ラジコン戦車の製作
1. RC戦車を組み立てる前に
1.1 部品チェック
| 名称 | 数 |
|---|---|
| https://www.tamiya.com/japan/products/70168/index.html | 1個 |
| https://www.tamiya.com/japan/products/70157/index.html | 1個 |
| https://www.tamiya.com/japan/products/70100/index.html | 1個 |
| ジャンパワイヤ 0.65mm(赤・黒) | |
| 単三アルカリ乾電池 | 3本 |
| microSDカード8GB以上 | 1枚 |
| DRV8835使用ステッピング&DCモータドライバモジュール | 1個 |
| 3軸加速度センターモジュール ADXL345 | 1個 |
| モバイルバッテリー | 1個 |
| USBケーブルAオス-マイクロBオス 0.15m | 1本 |
| ブレッドボードEIC801 | 1個 |
| 電池ボックス単3X3本 リード線 | 1個 |
| Raspberry Pi0 | 1個 |
| SDカード変換アダプター | 1個 |
1.2 共用道具
- ハンダ
- ハンダごて
- ニッパー
- プラスドライバー
- ワイヤストリッパー
- カベタックスポンジ両面
1.3 デモ機
2. ラジコン戦車の車体を組み立てよう
2.1 ギヤボックスを組み立てよう
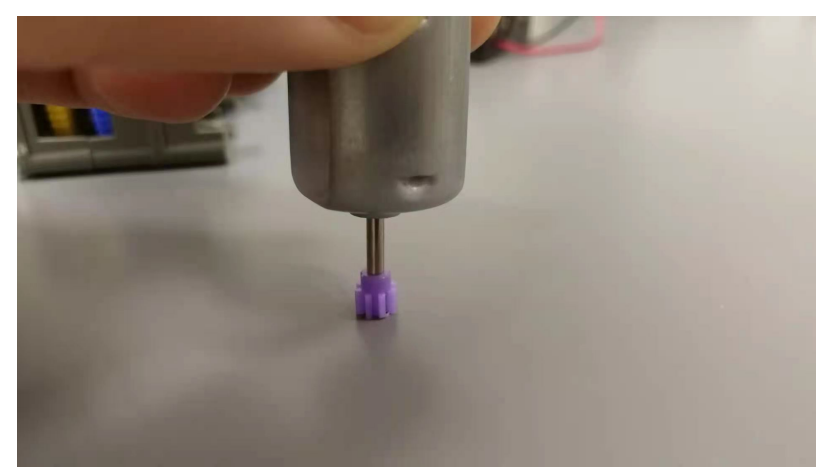
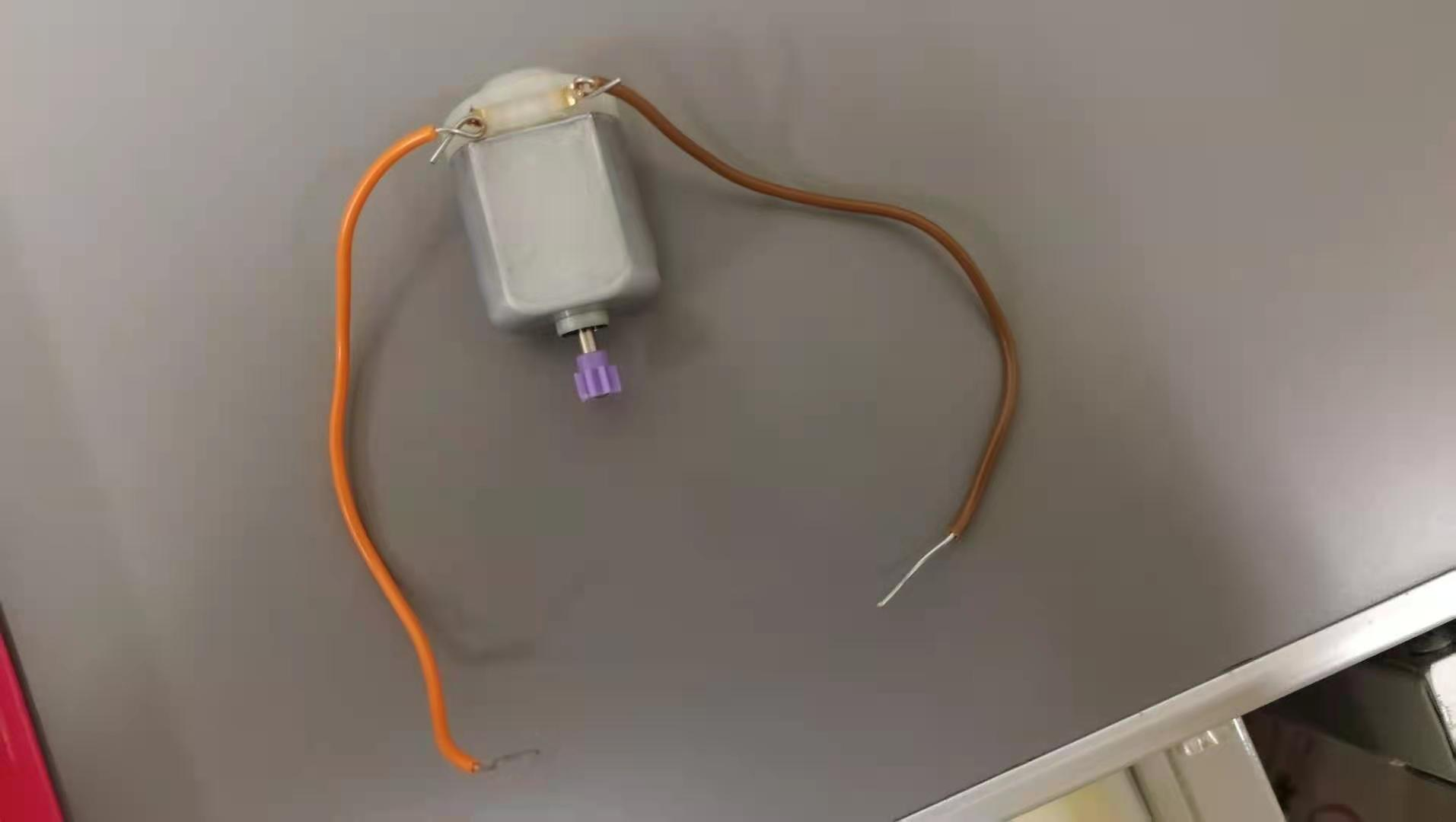
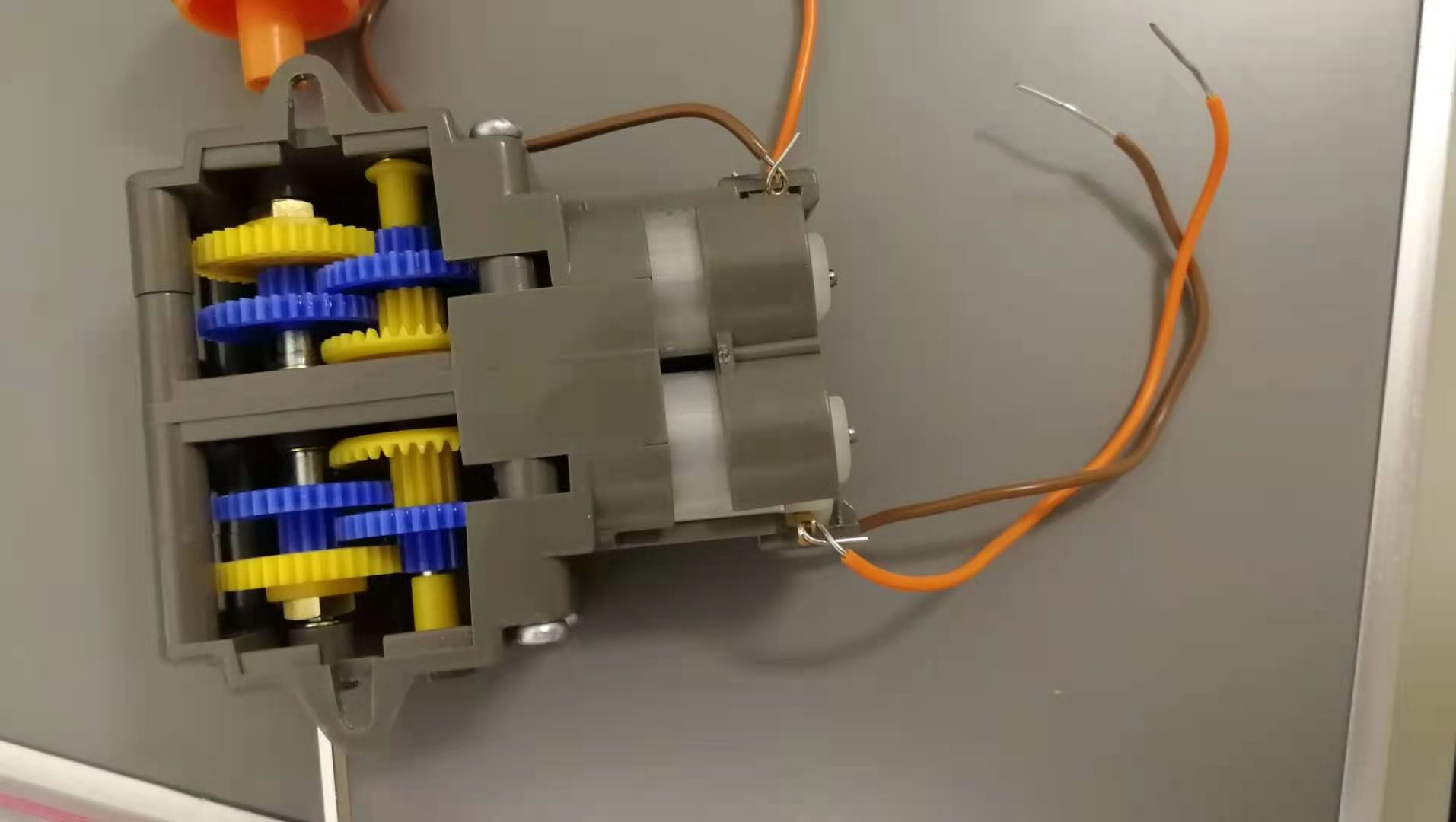
2.1.1 モータに配線をつけよう
A モーターのギア(紫色)を固い机などの上でモーターの軸の部分に押し込みます。
B モーターに電気を流すための配線をつけて、ハンダごてとハンダをくっつけてします。
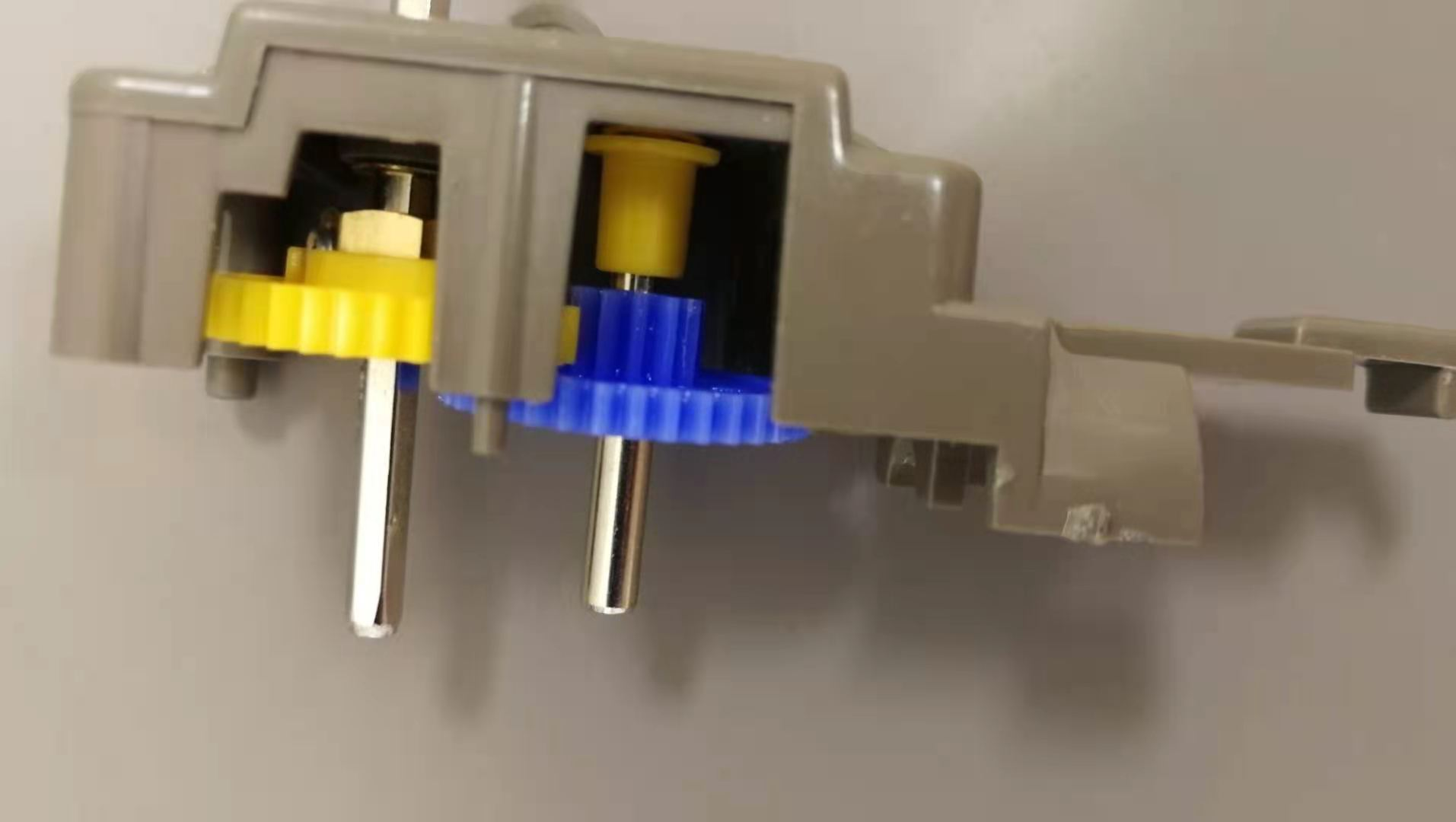
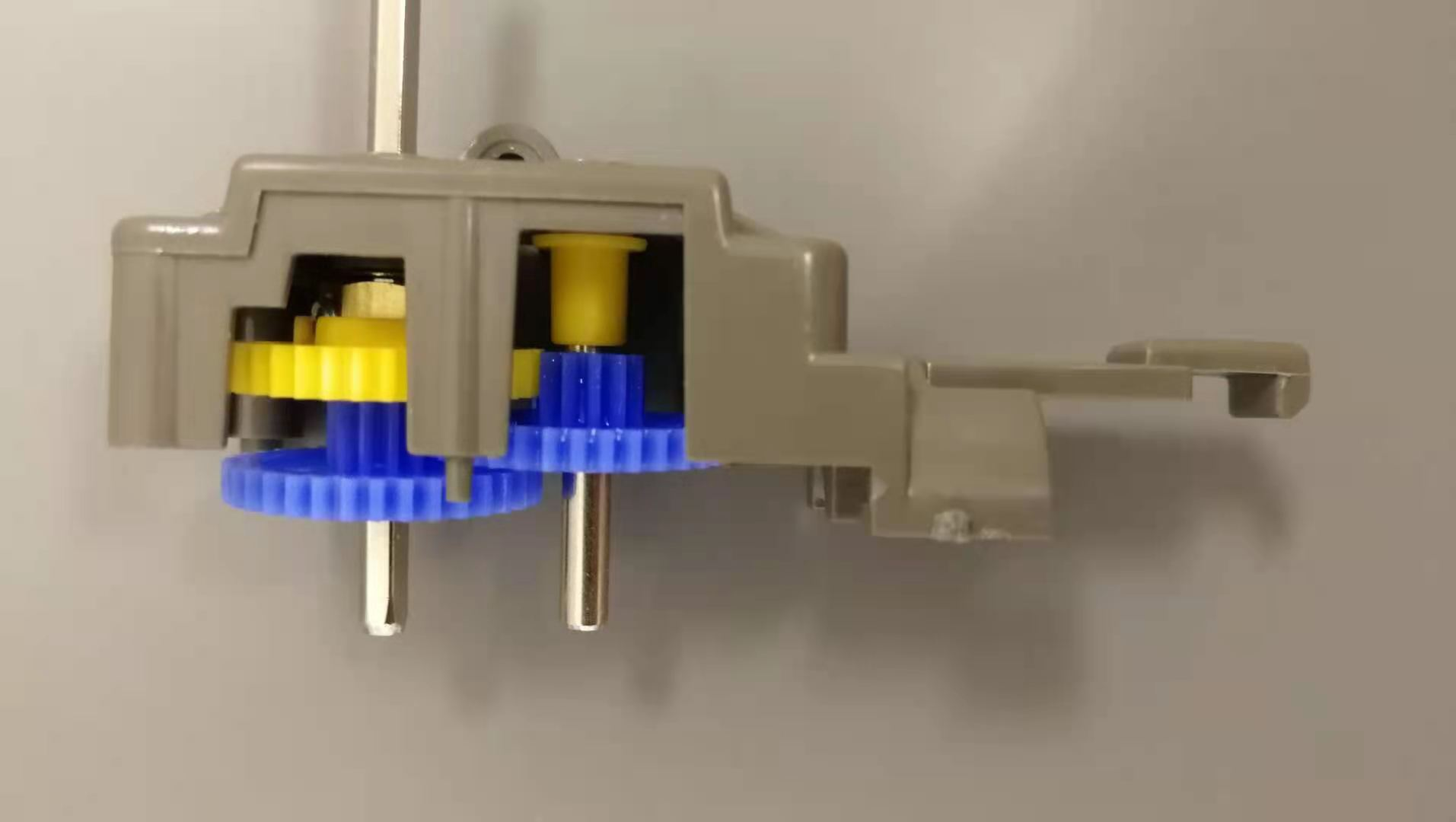
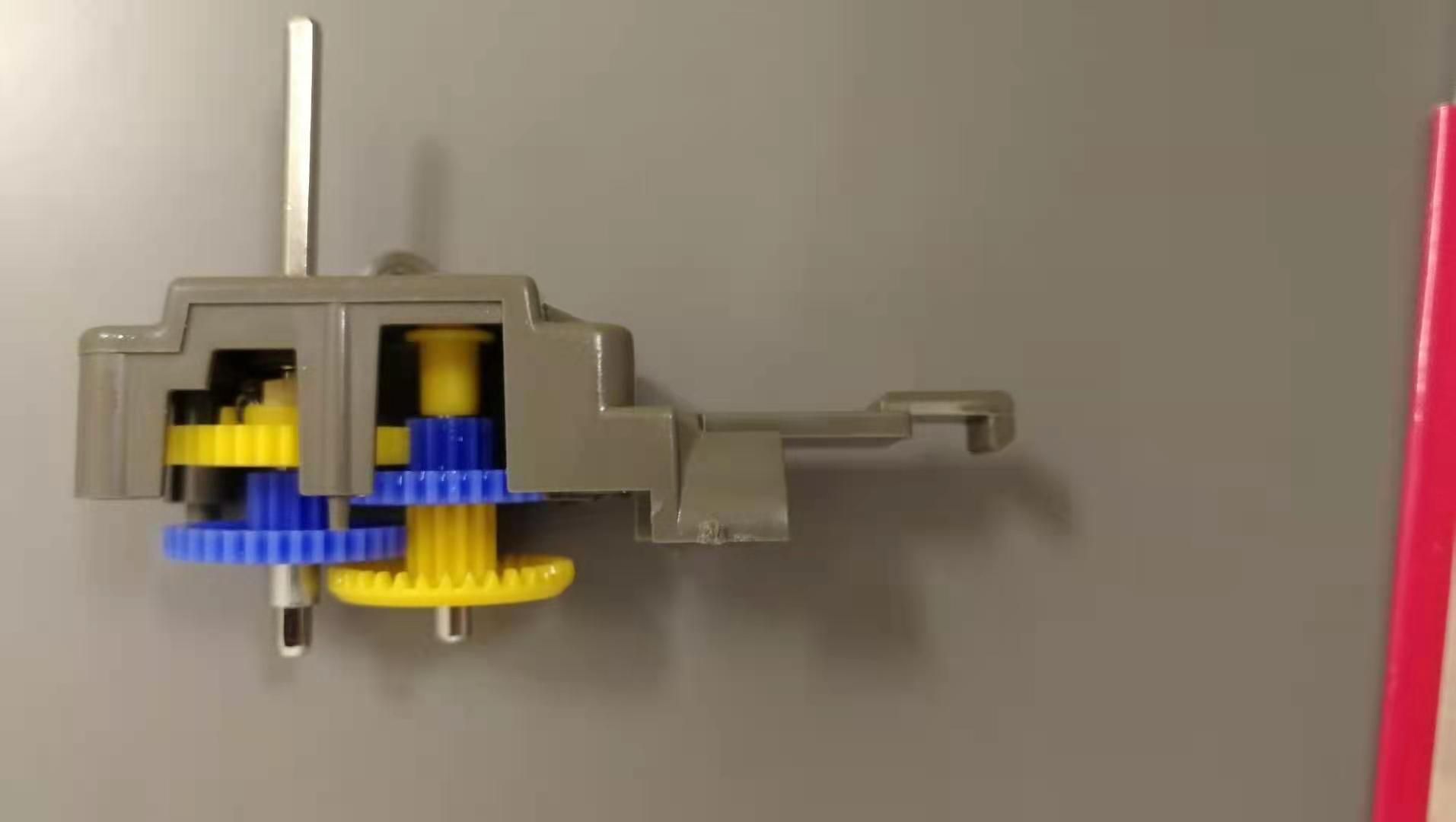
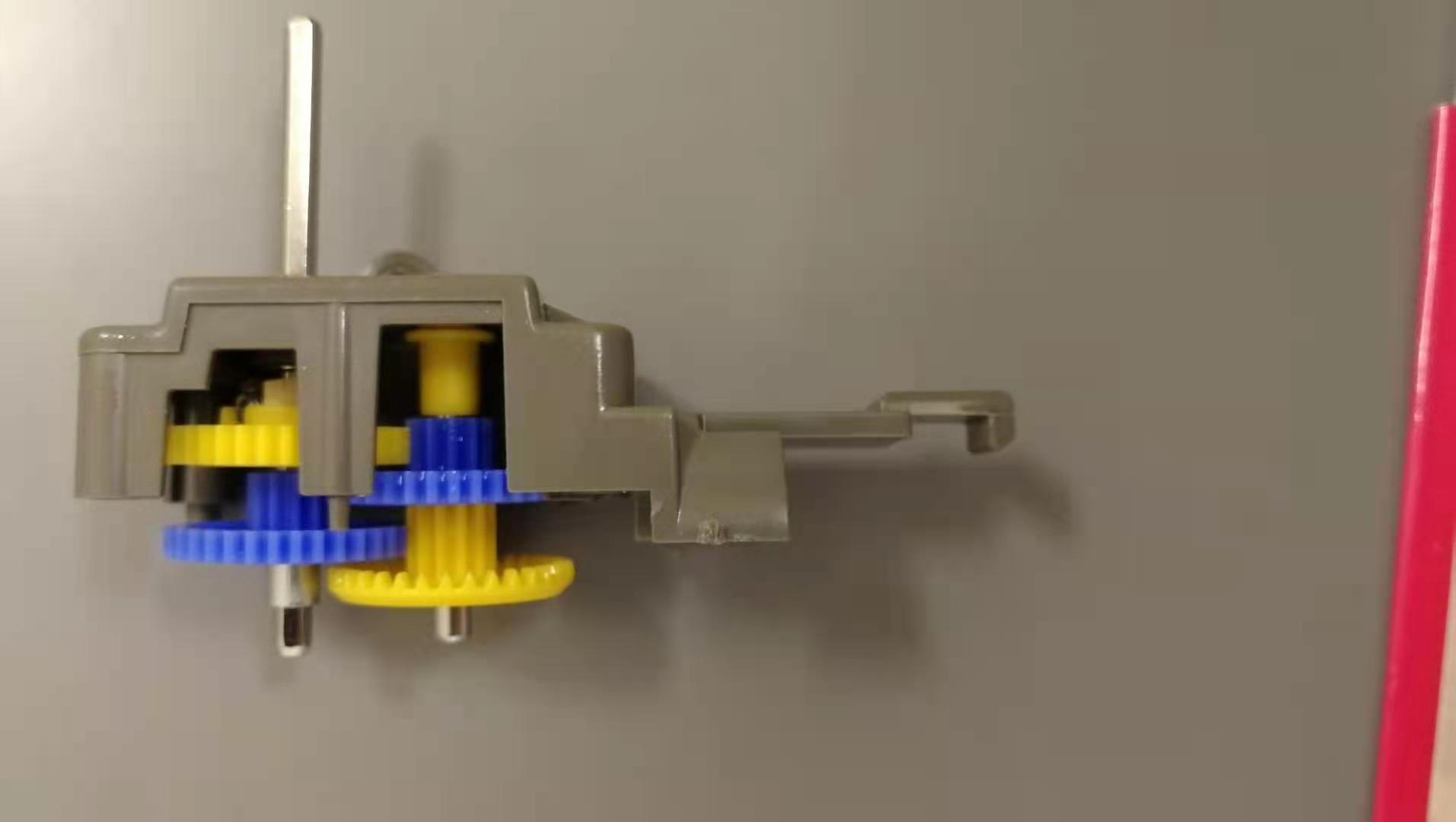
2.1.2 ギヤボックスを組み立てよう
A ギヤがTypeCを選択する(114.7:1)(ギア比を確認画像不足)
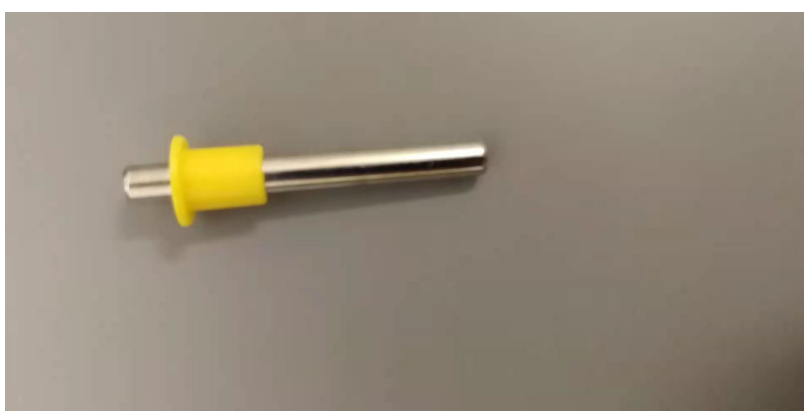
B 黄色の小さの円筒形の部品と短い金属棒組み立てる
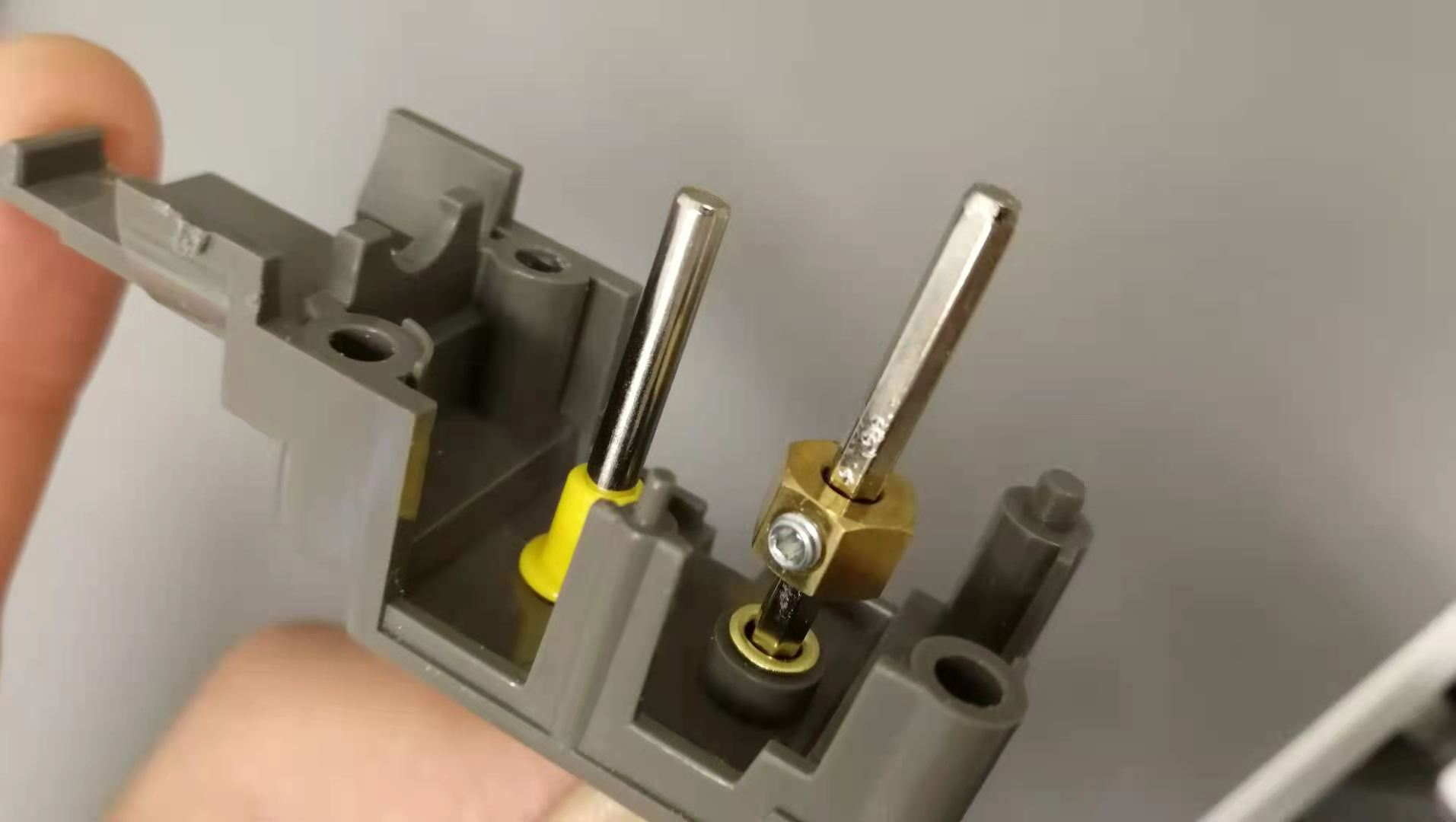
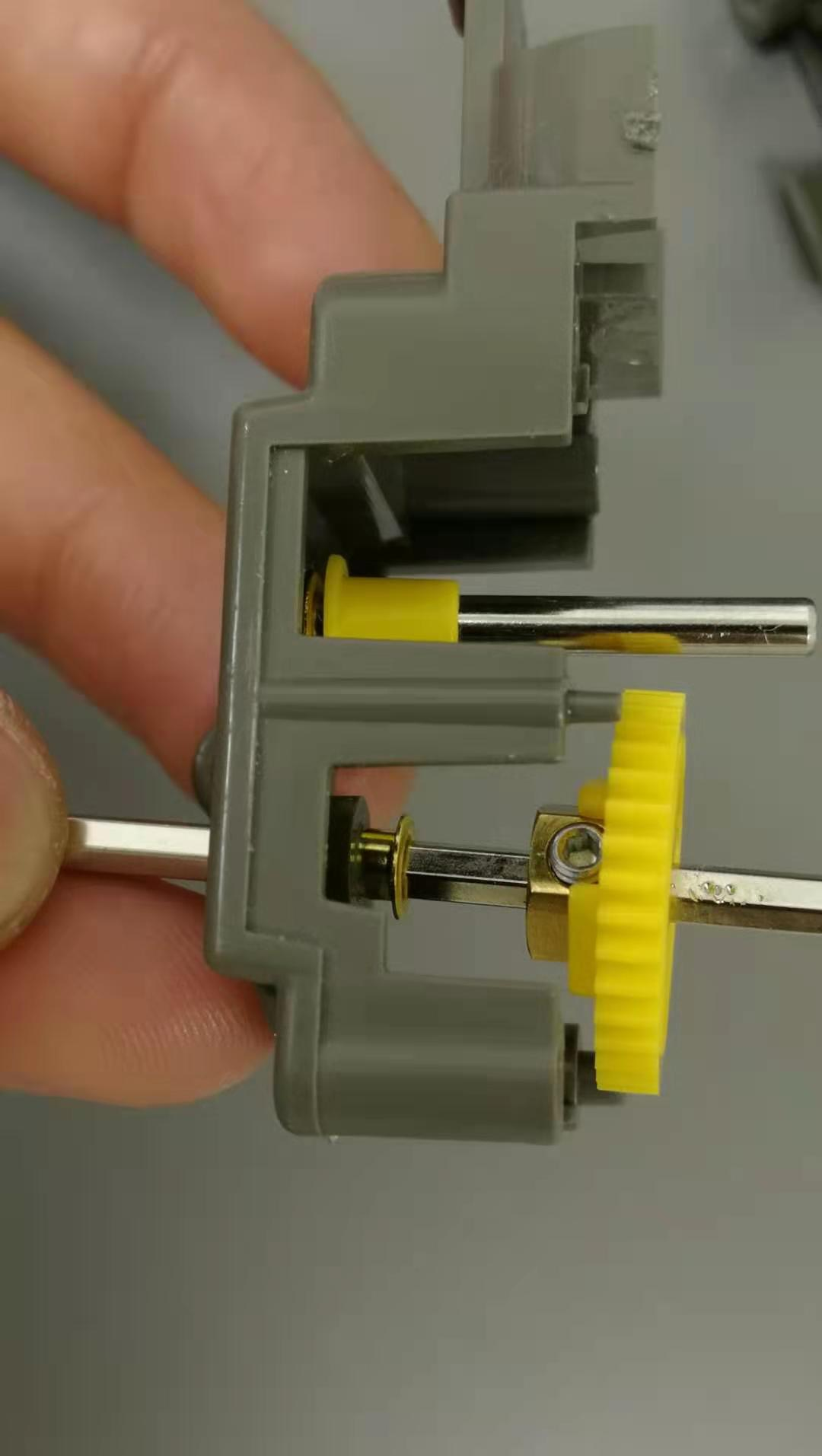
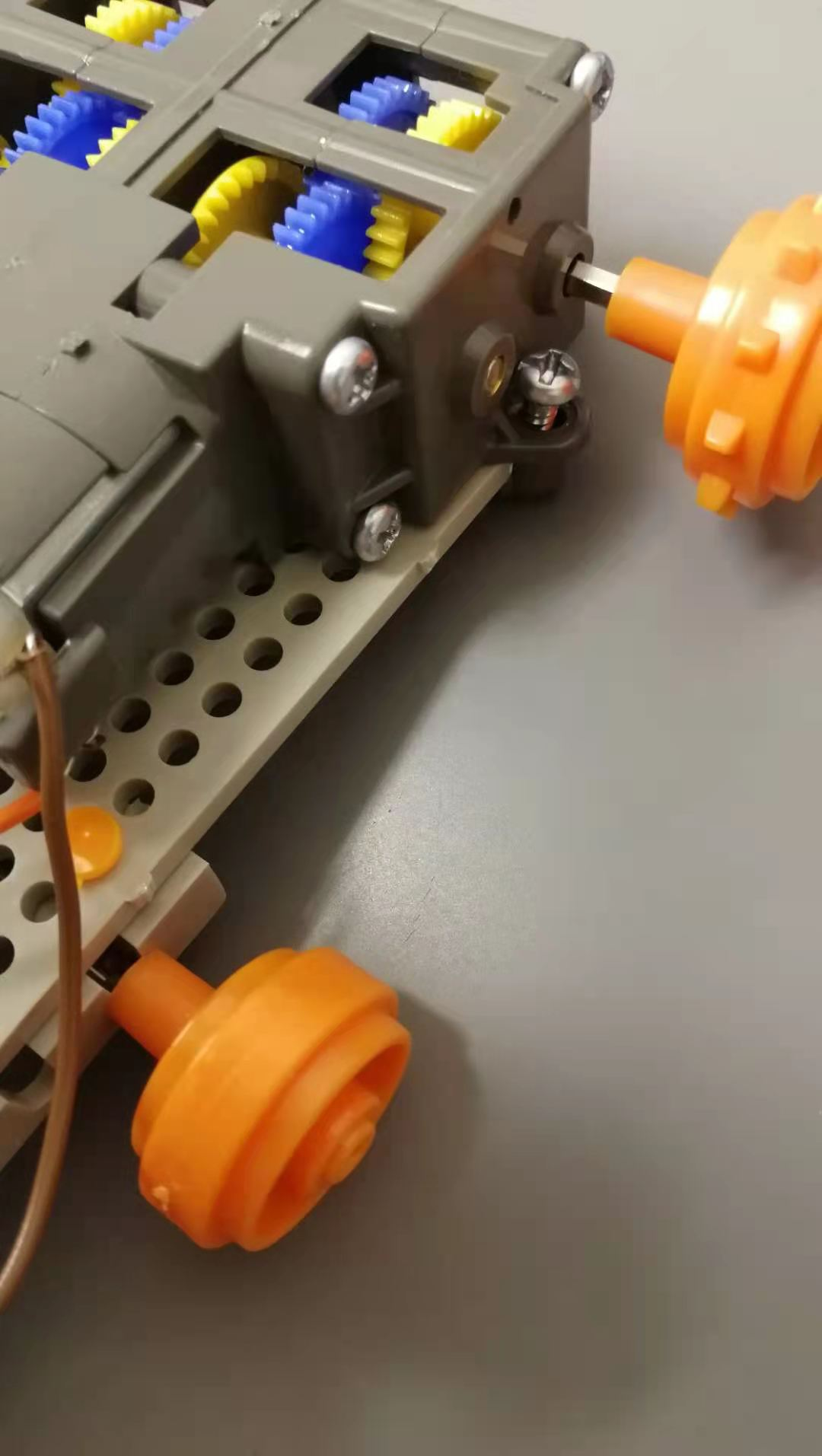
C 長いシャフトに金色のストッパーをはめ込んで、小さいネジを使用して六角レンチで固定する。

D ギアボックスのケースの穴に金色の金具を取り付けてから差し込んで、短いシャフトをケースの中央あたりの穴に差し込み、長いシャフトをケースの端あたりの穴に差し込みます。
E ギアを組み合わせる(4枚画像)
F ケースを合わせこんで、左右のネジ穴にネジをきちんと差し込みます。
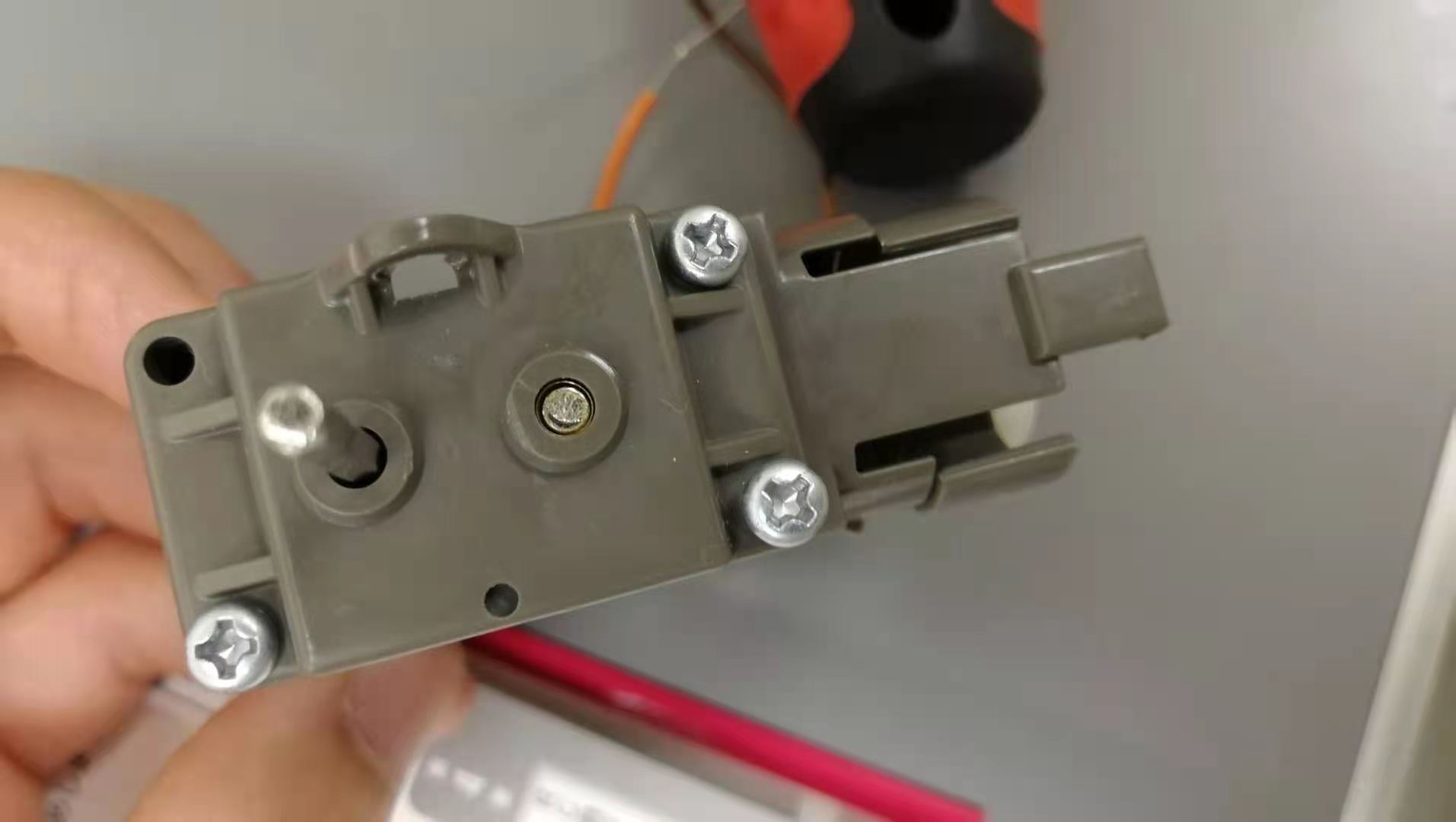
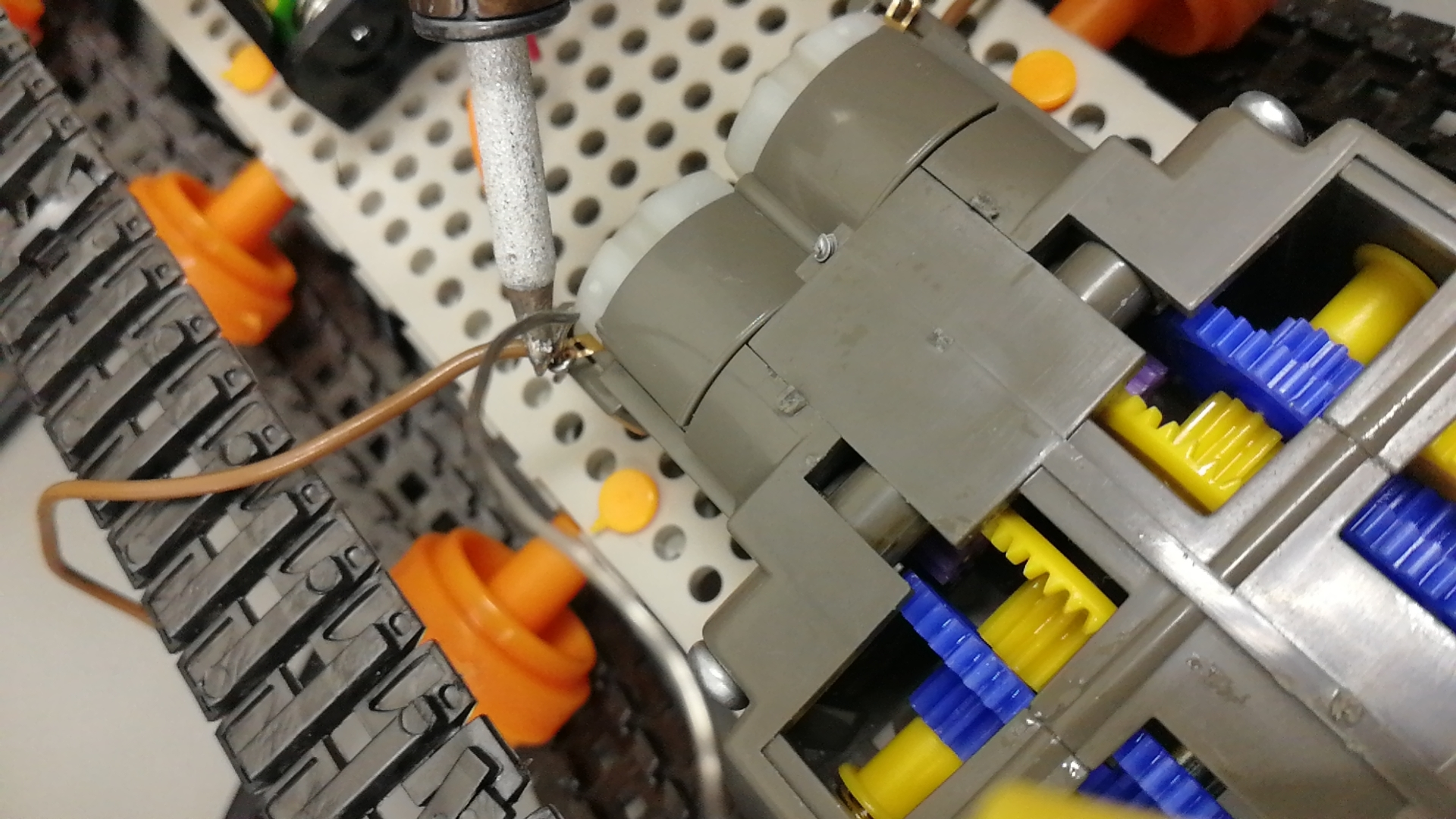
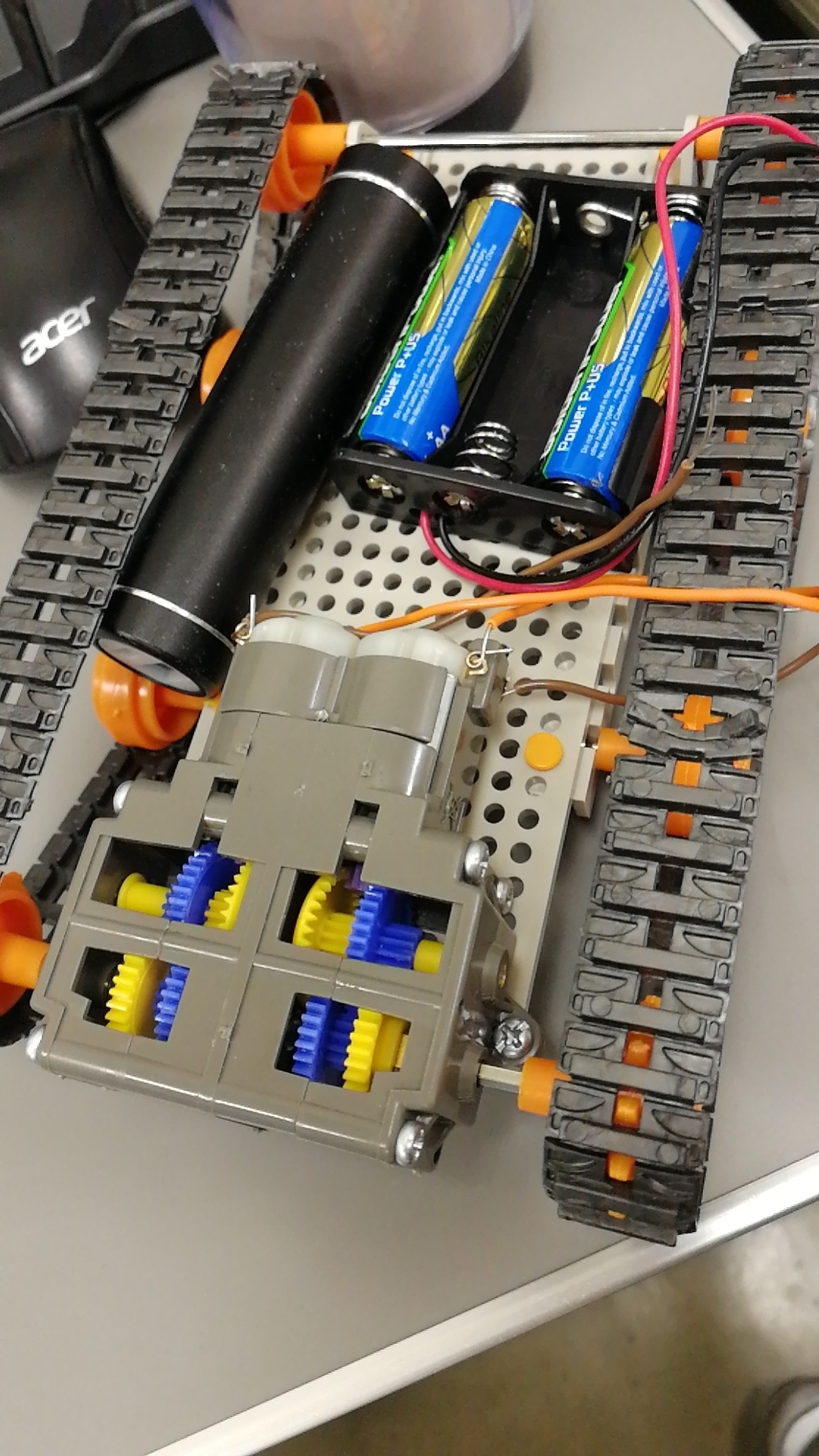
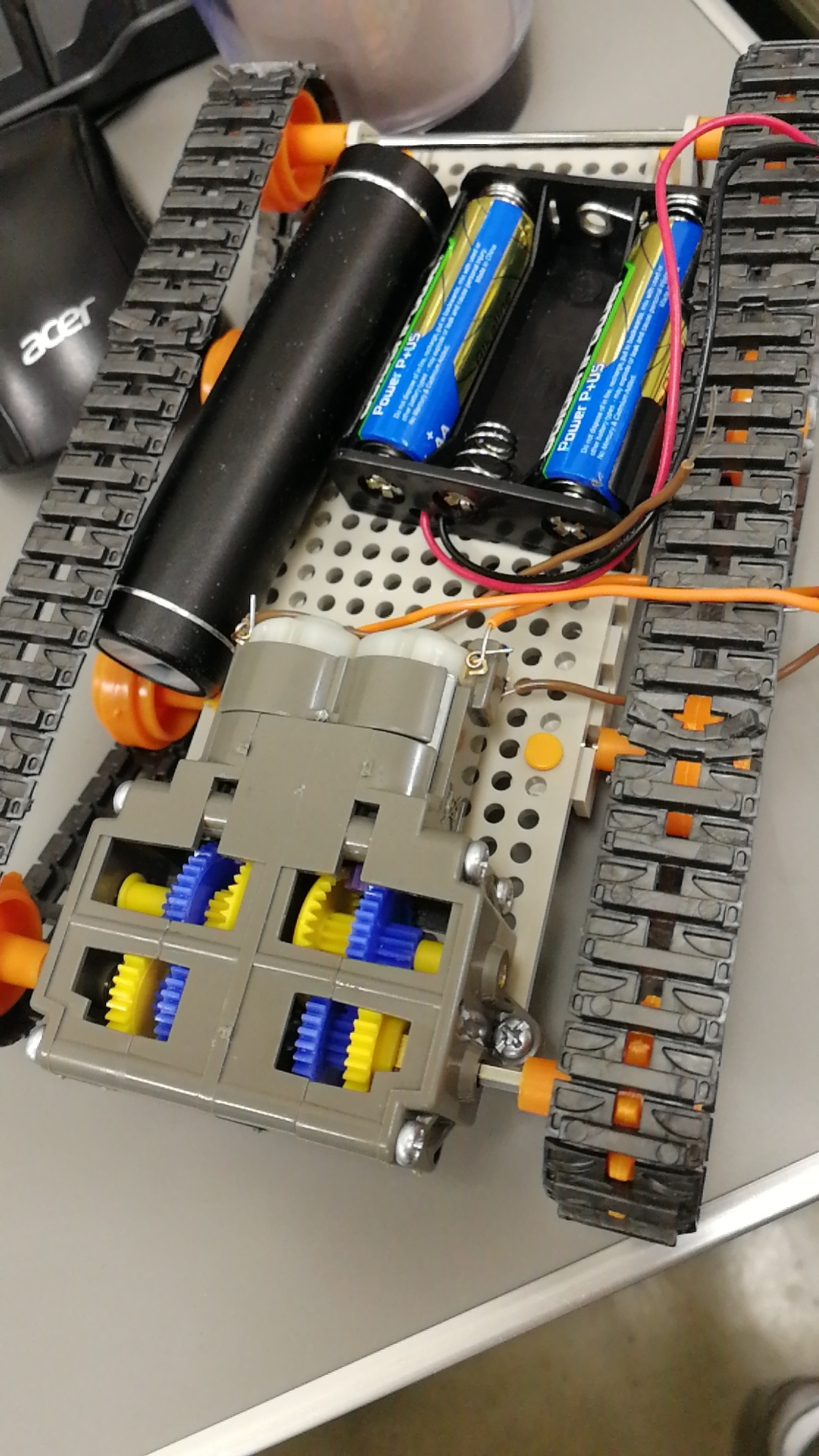
2.1.3 モーターを装着する
A モーターの配線が外向きになるように装着する。
2.1.4 注意
2.2 シャーシを組み立てよう
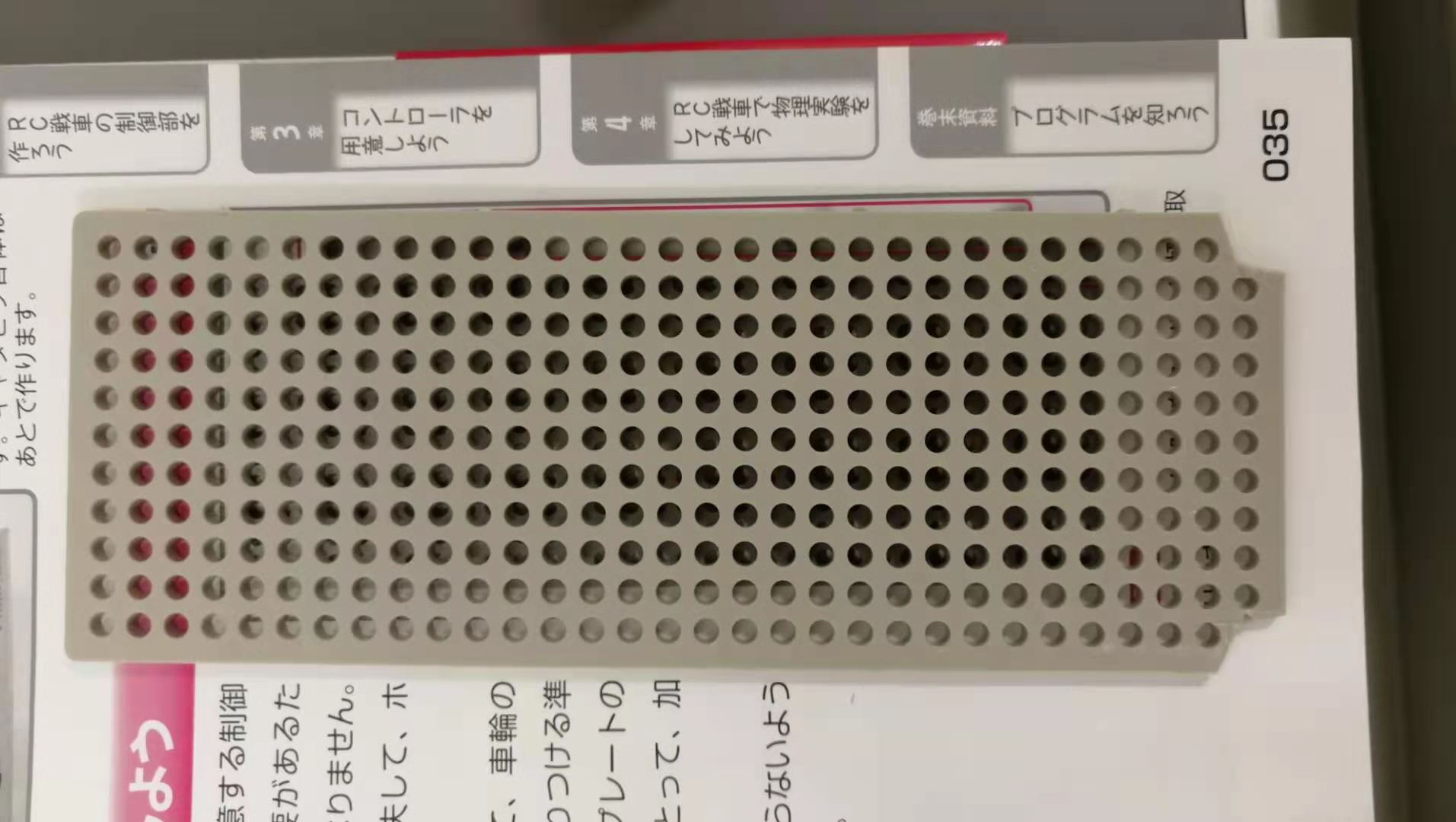
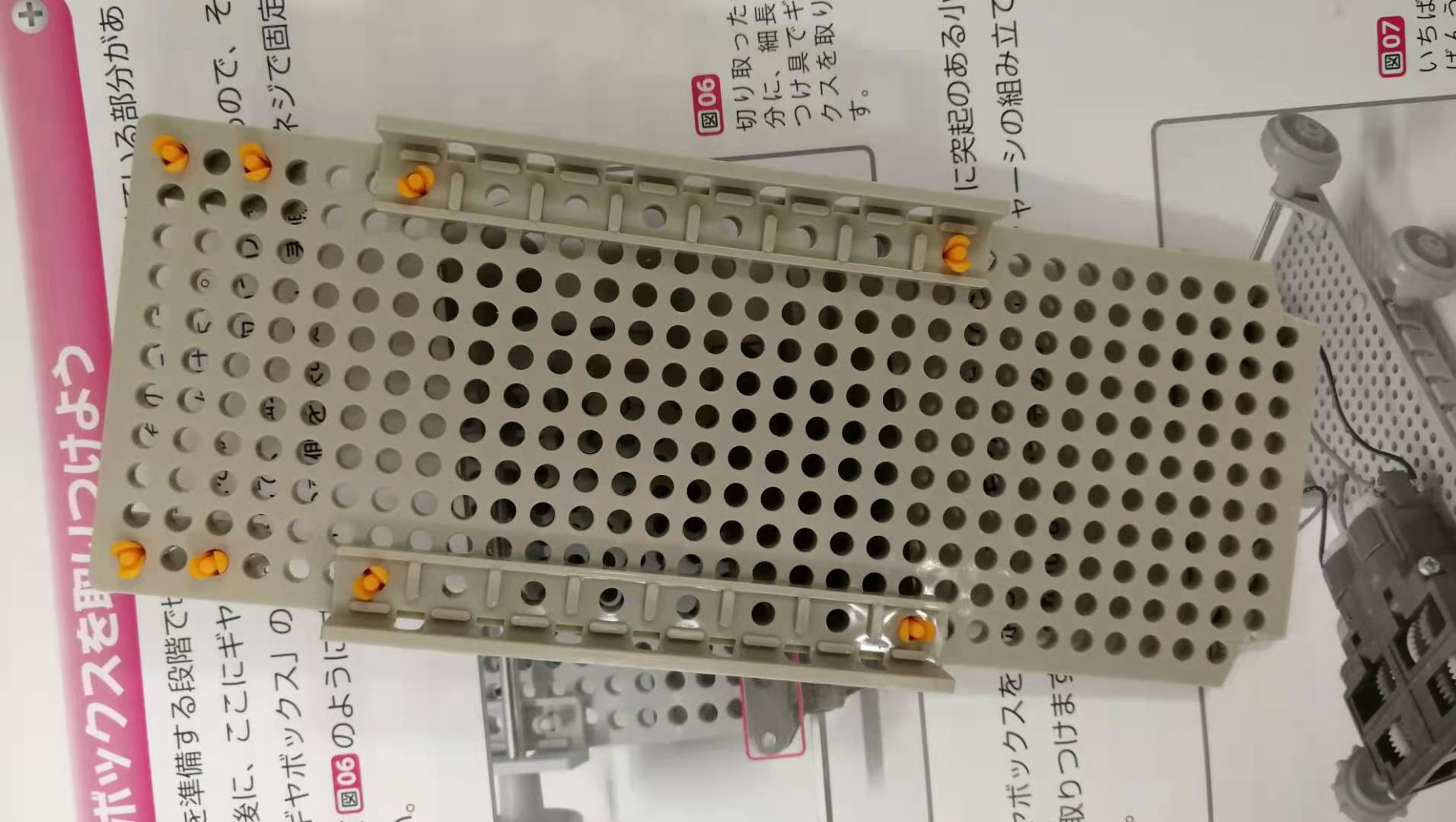
2.2.1 プレートを準備する
A プレート端と2つ角をニッパーで切ります。
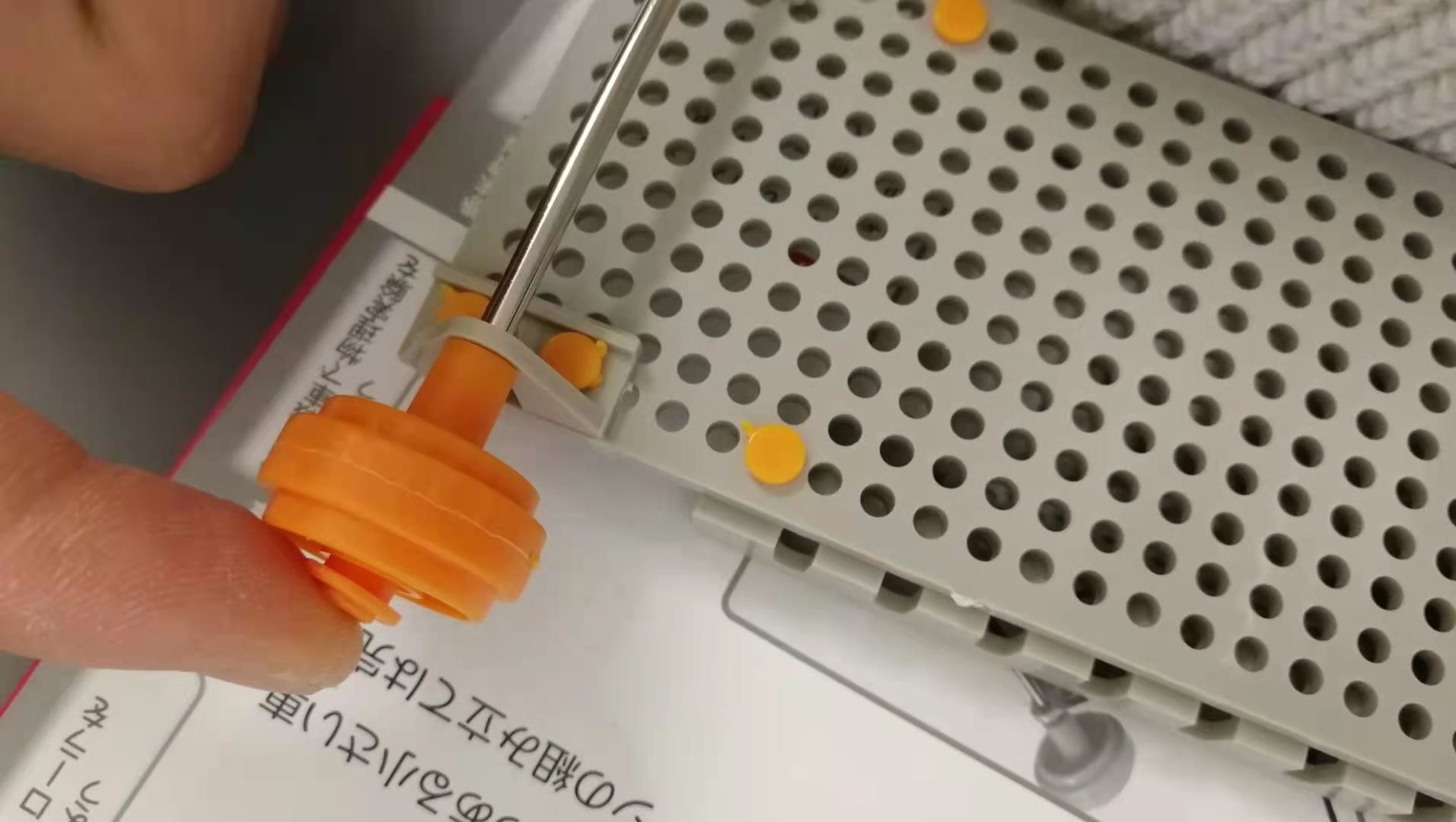
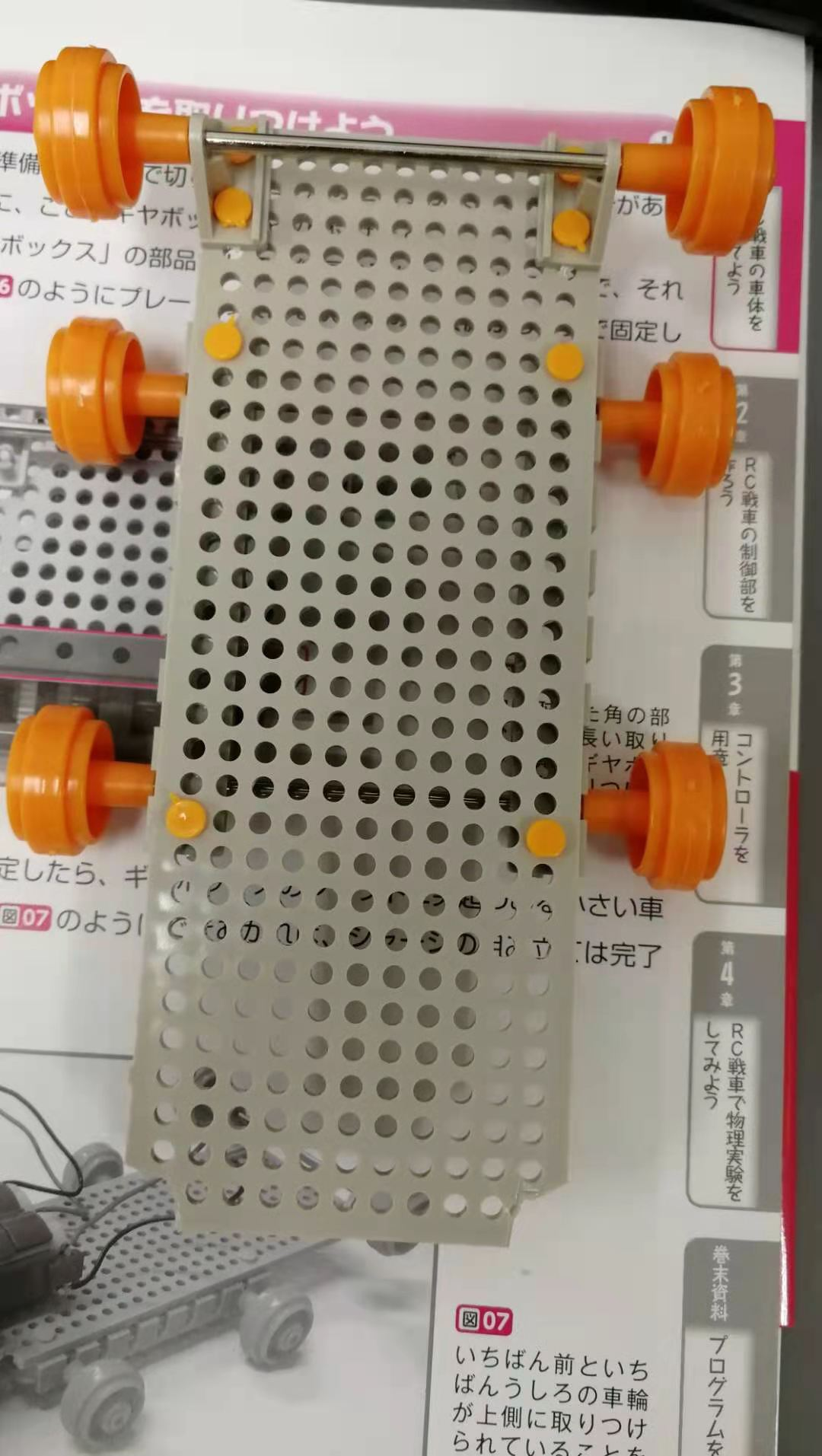
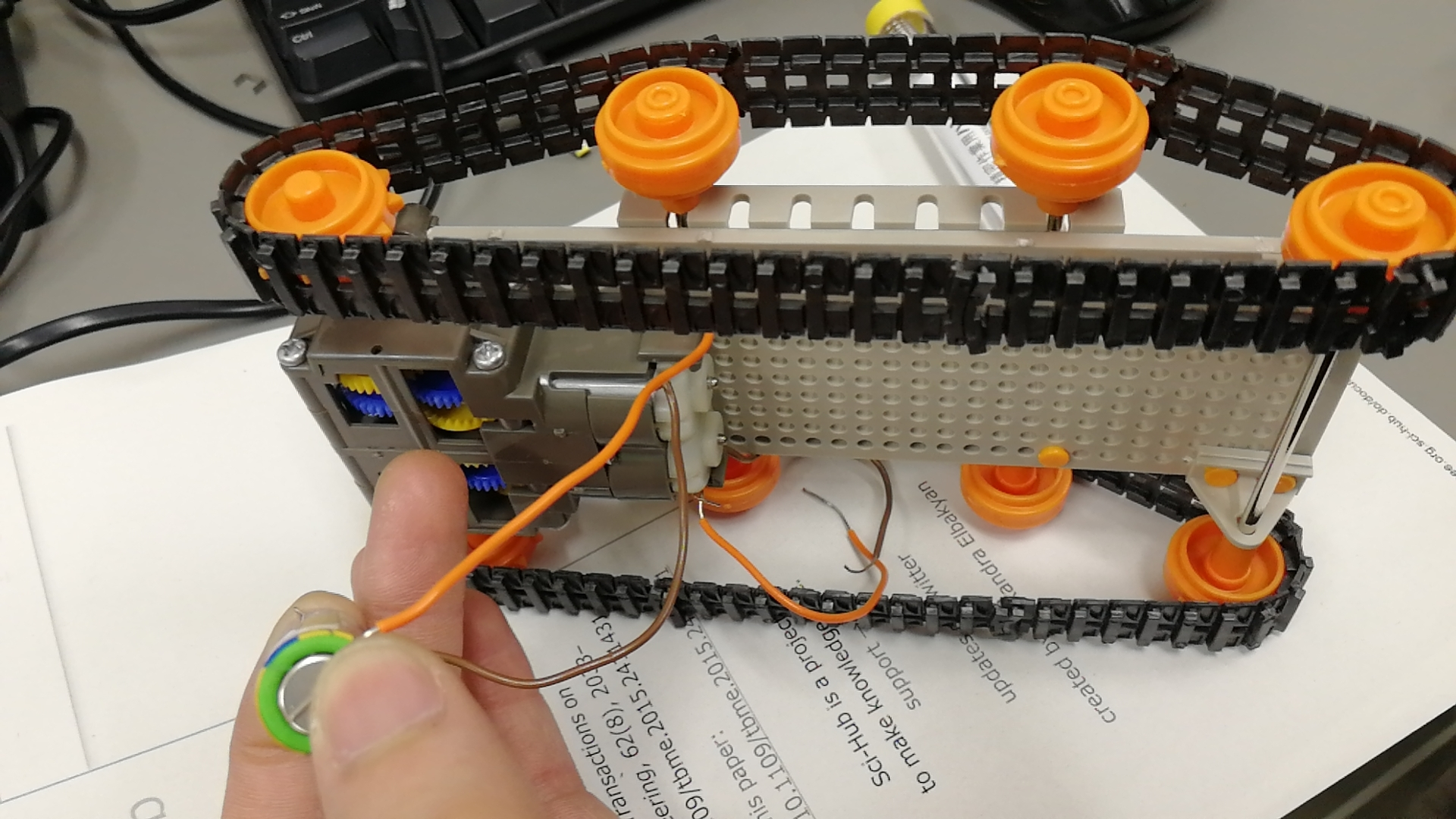
2.2.2 車輪を取り付ける
A 車輪のシャフトを通す土台を配置して、オレンジ色のビスを穴に差し込んで固定する。(2枚画像)
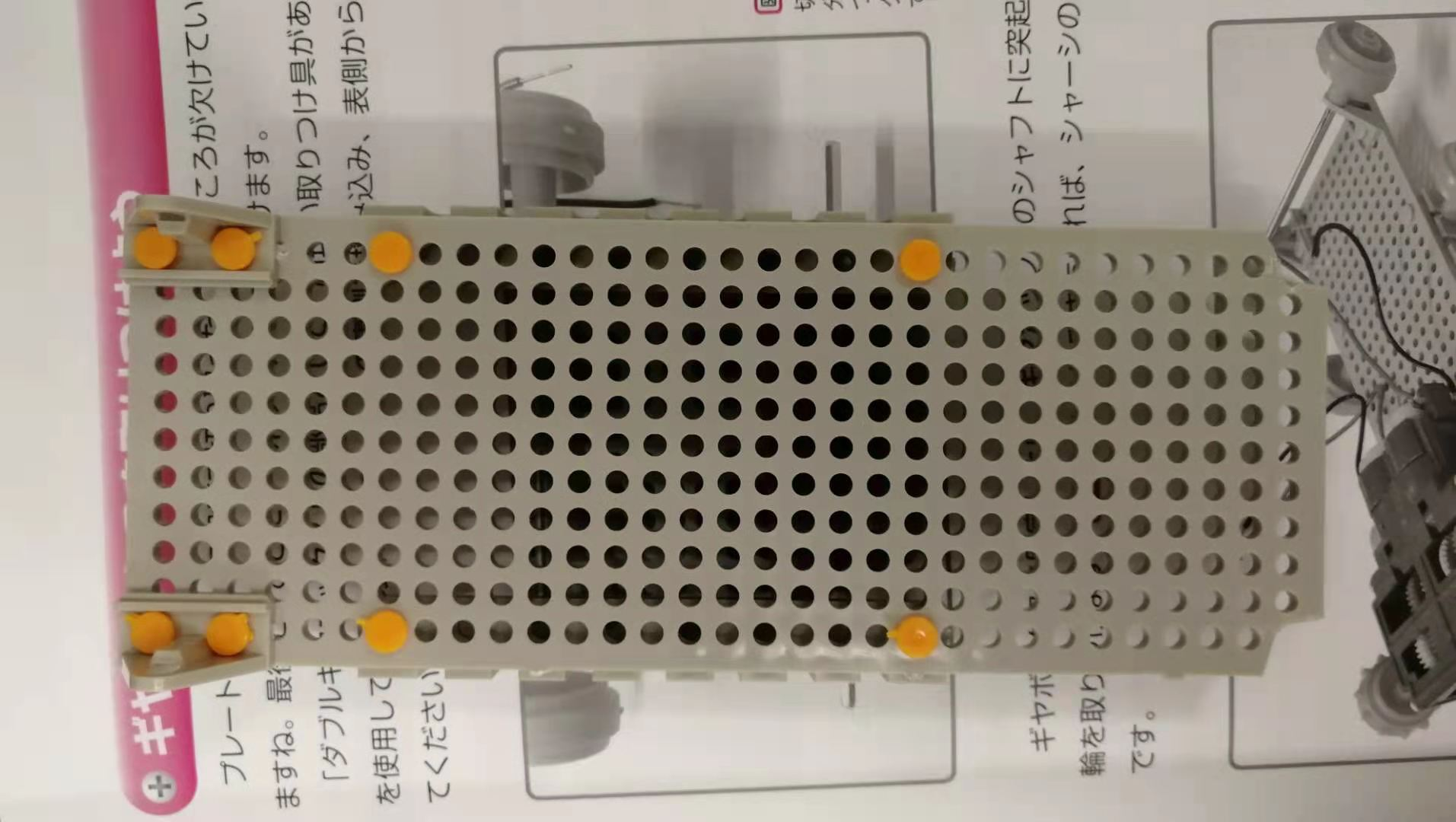
B 土台の穴に車輪シャフトを差し込み、それぞれの左右から、車輪を差し込んで取り付ける。
2.2.3 ギアボックスを取り付ける
A 細長い取り付け具がプレート裏側を狭み込む。

B ギアボックスのシャフトに突起のある小さい車輪を取り付ける。
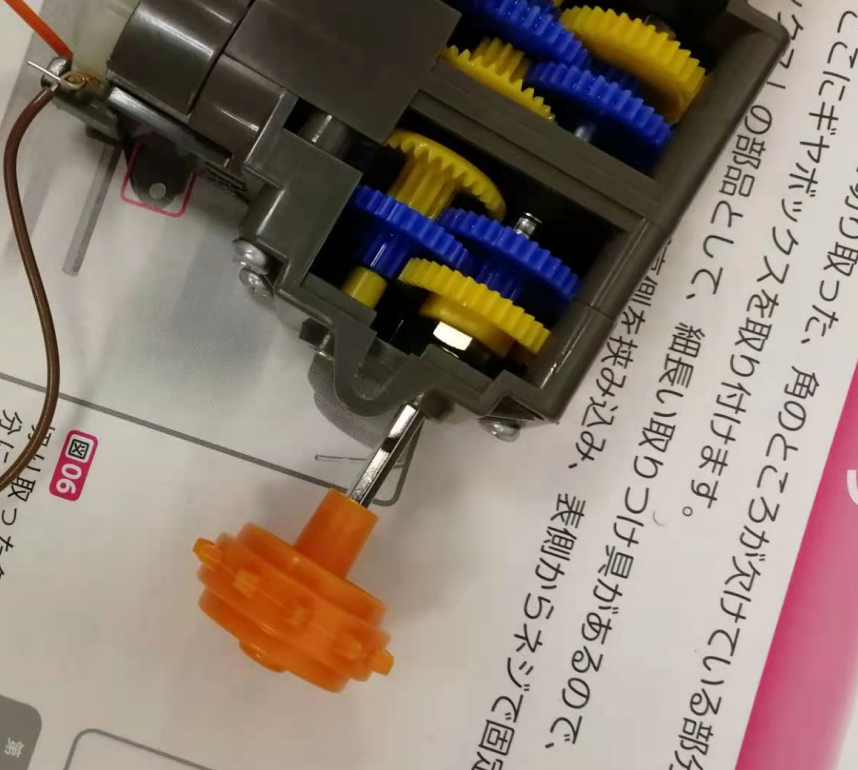
C ギアボックスとプレートネジで固定する。
2.2.4 注意
2.3 キャタピラーを組み立てよう
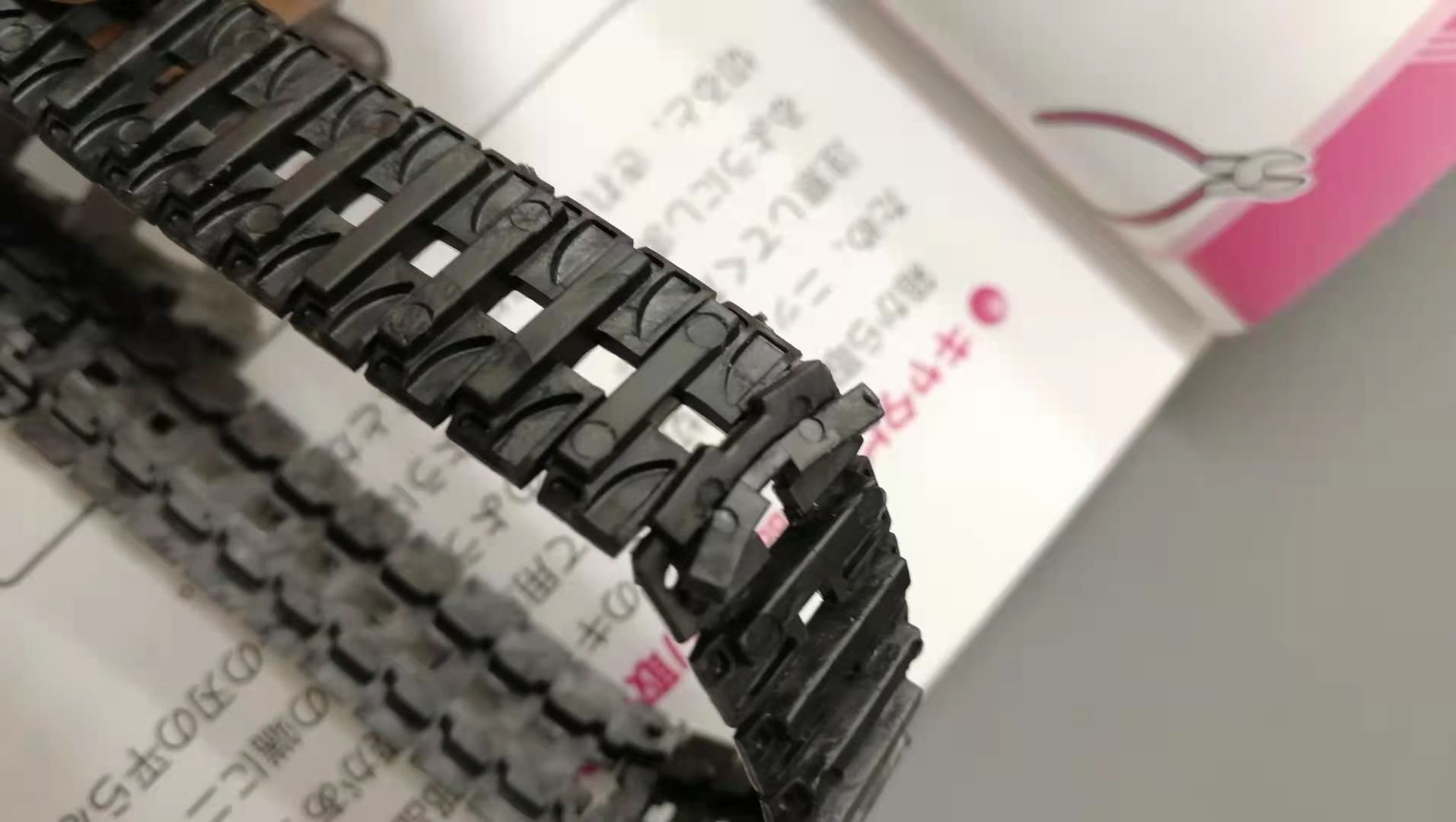
2.3.1 キャタピラーをつなげる
A 長い部品+中く部品+中く部品+短い部品
B キャタピラーを装着する
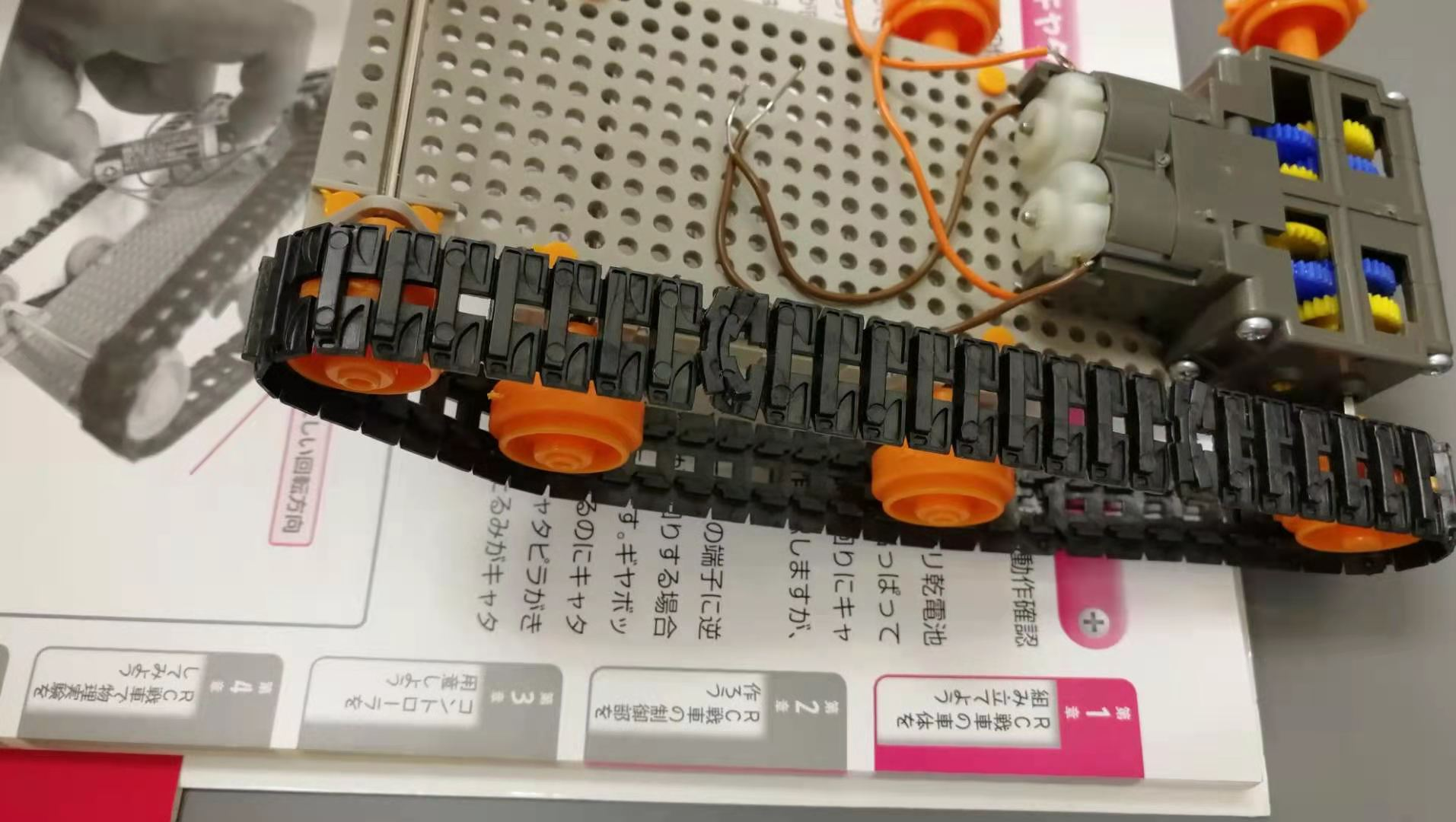
C キャタピラーが回るか確認しよう
3. ラジコン戦車の制御部を作ろう(アシスタントのみ)
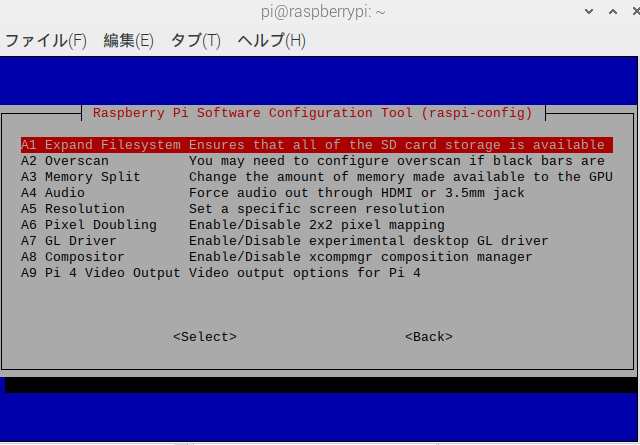
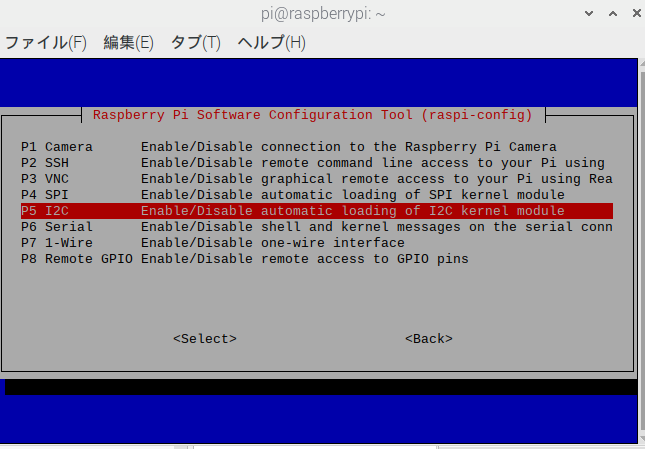
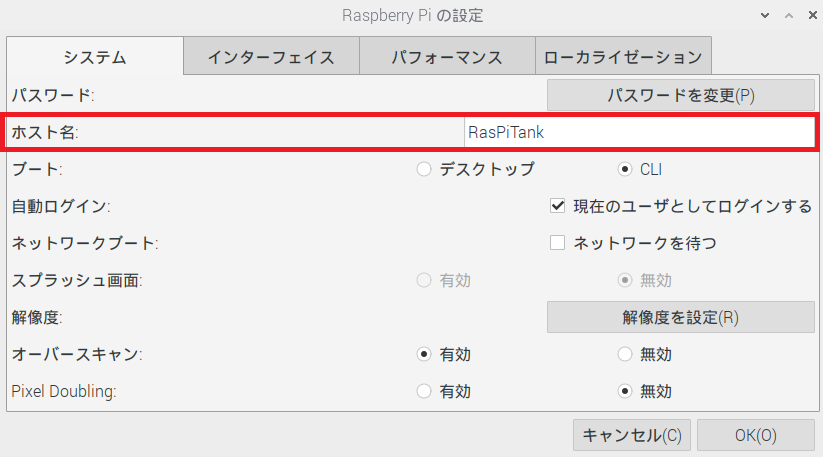
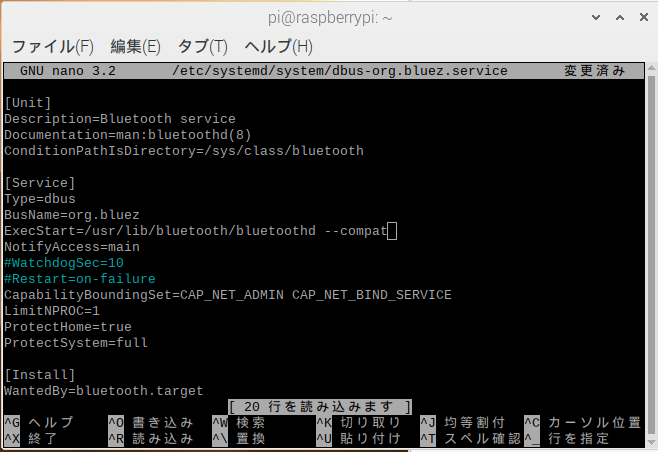
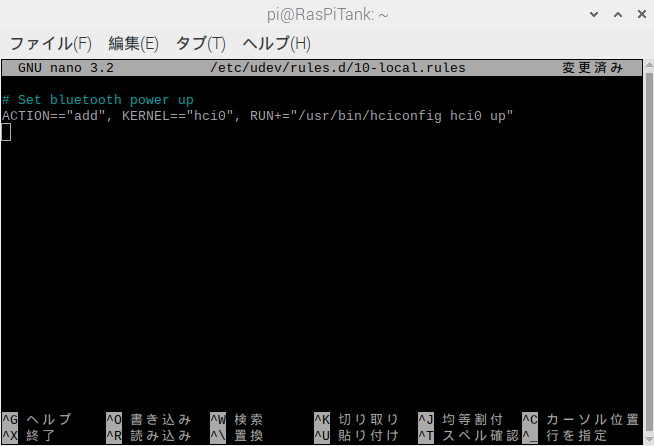
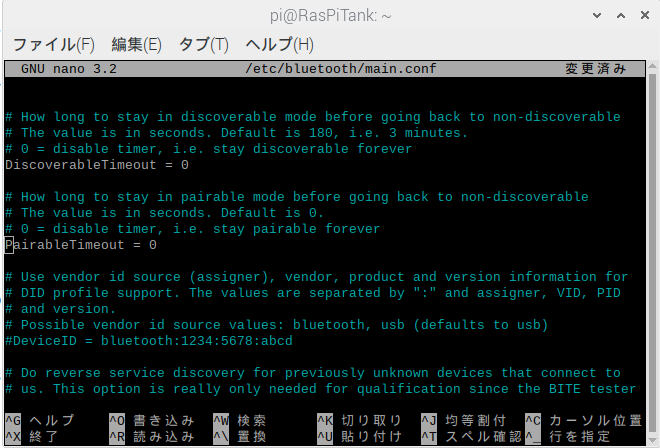
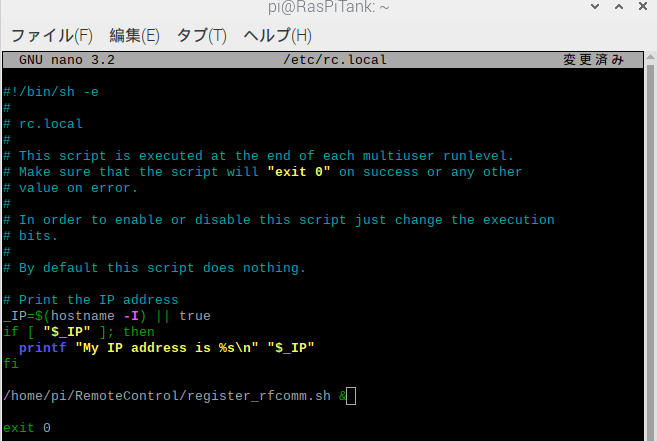
3.1 Raspberry Pi0を設定しよう
3.1.1 Win32 Disk Imagerをダウンロード、インストールする

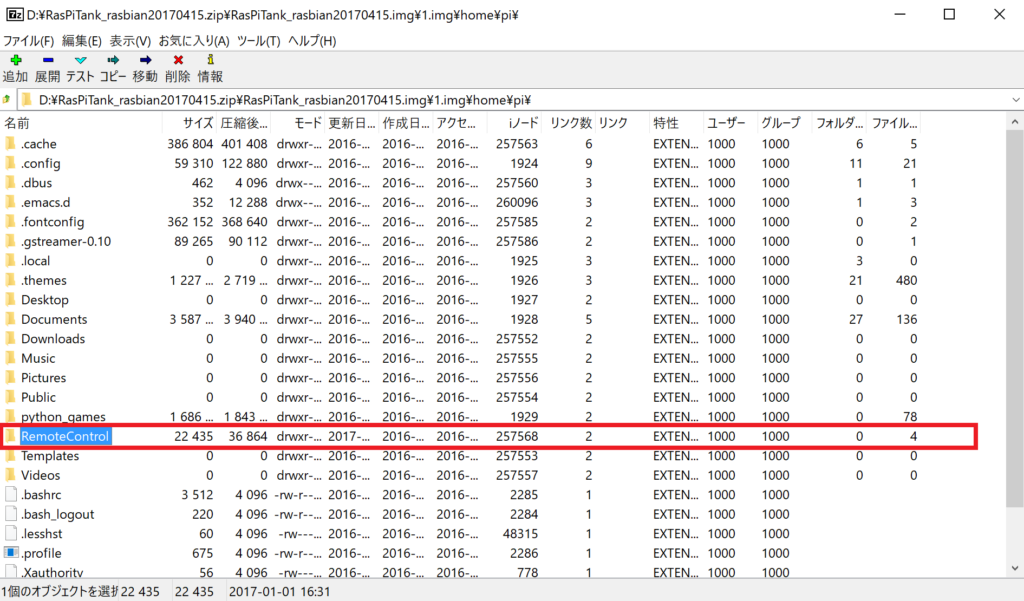
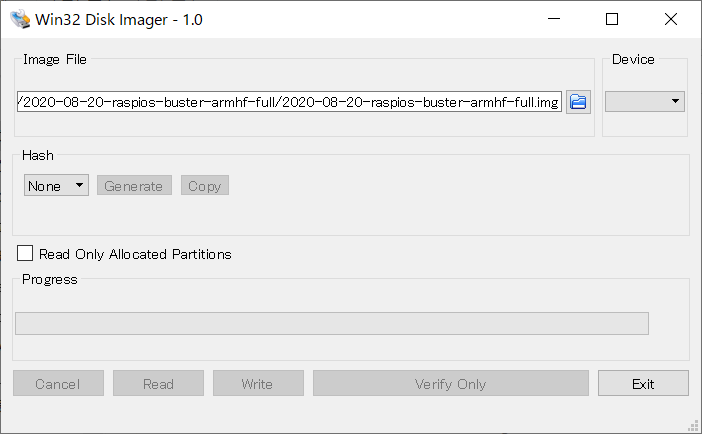
3.1.2 RaspianをmicroSDカードに入れよう
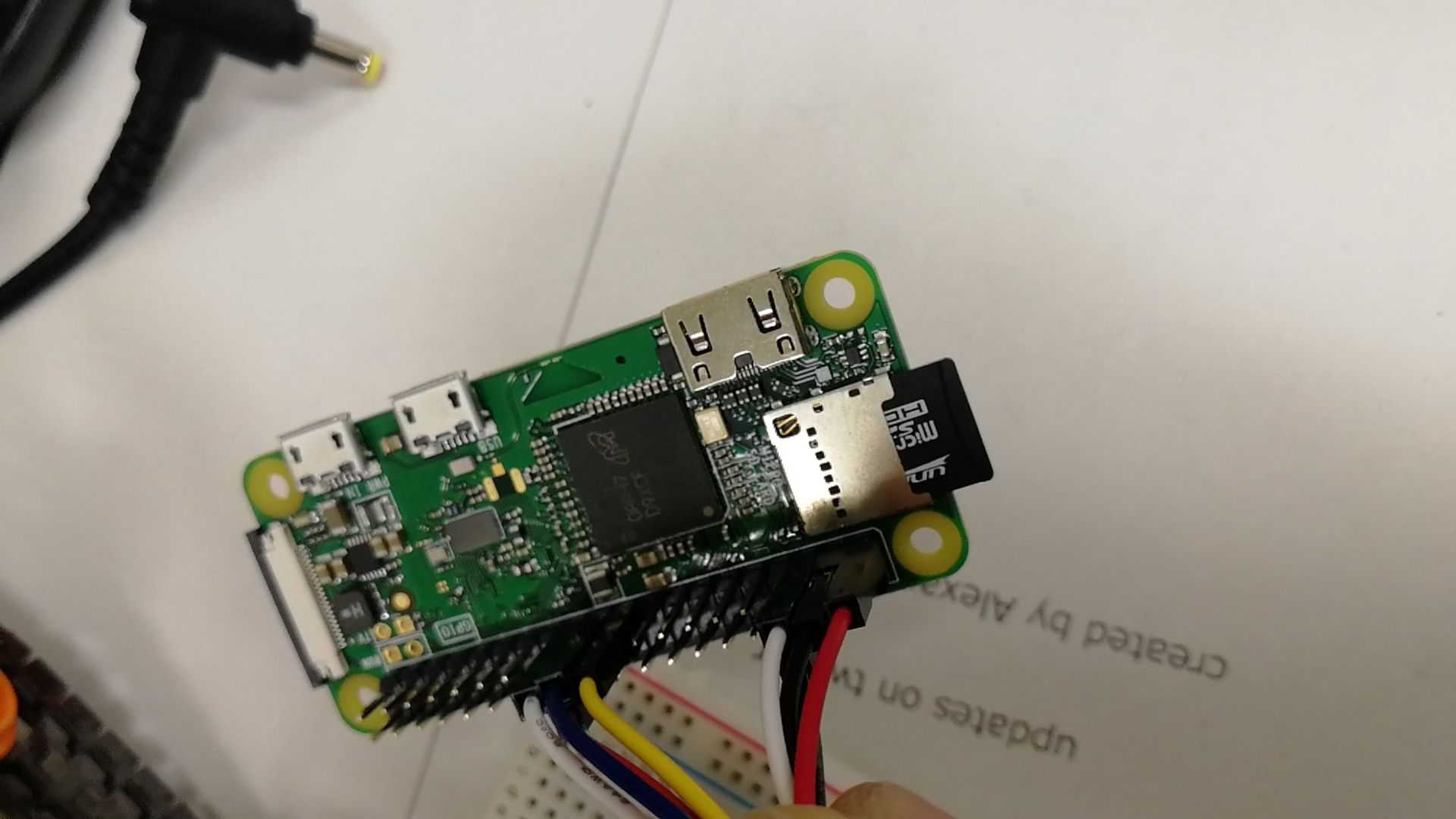
3.1.3 microSDをRaspberry Pi0をセットしよう
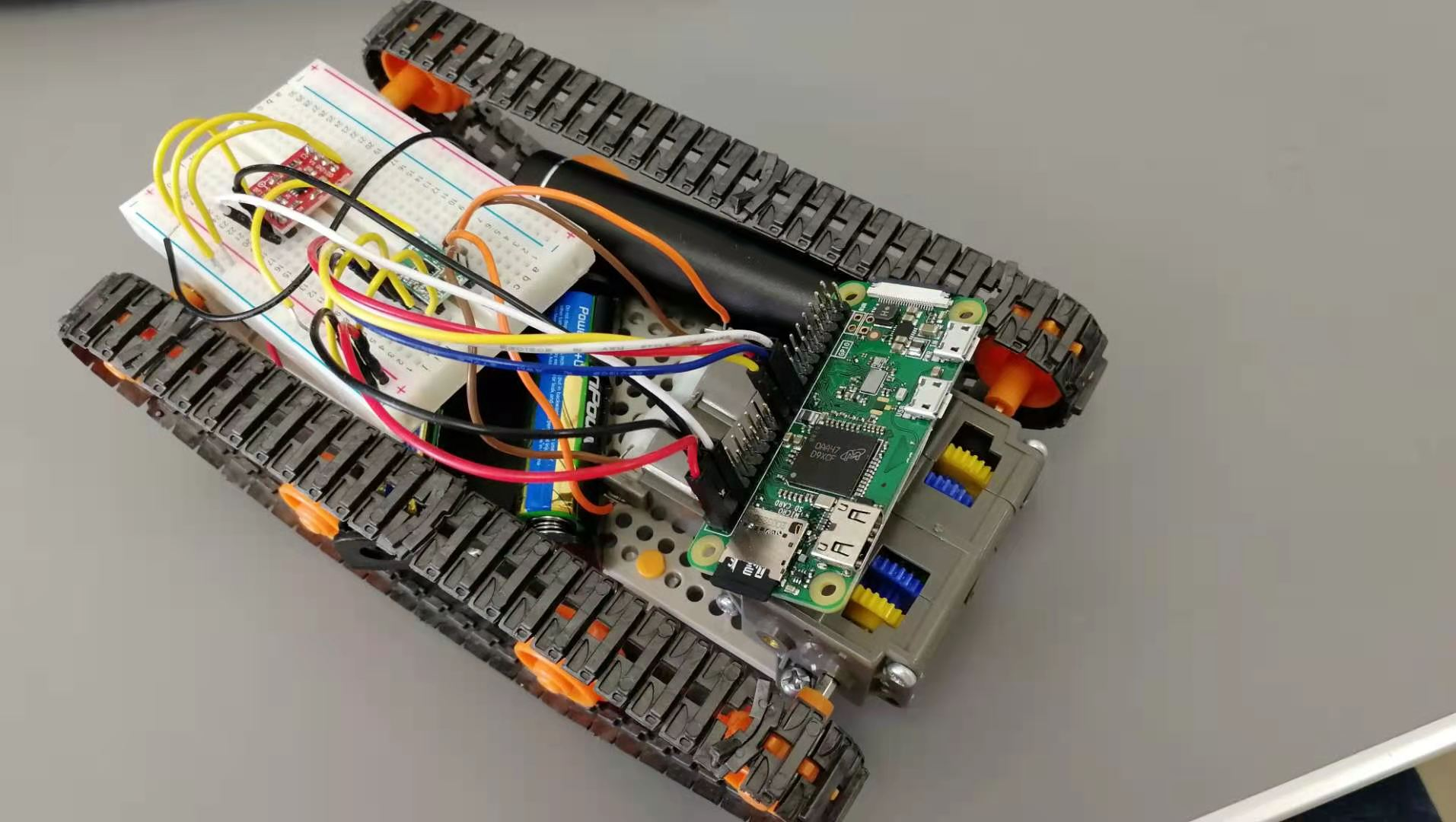
3.2 ラジコン戦車にラズパイを搭載しよう
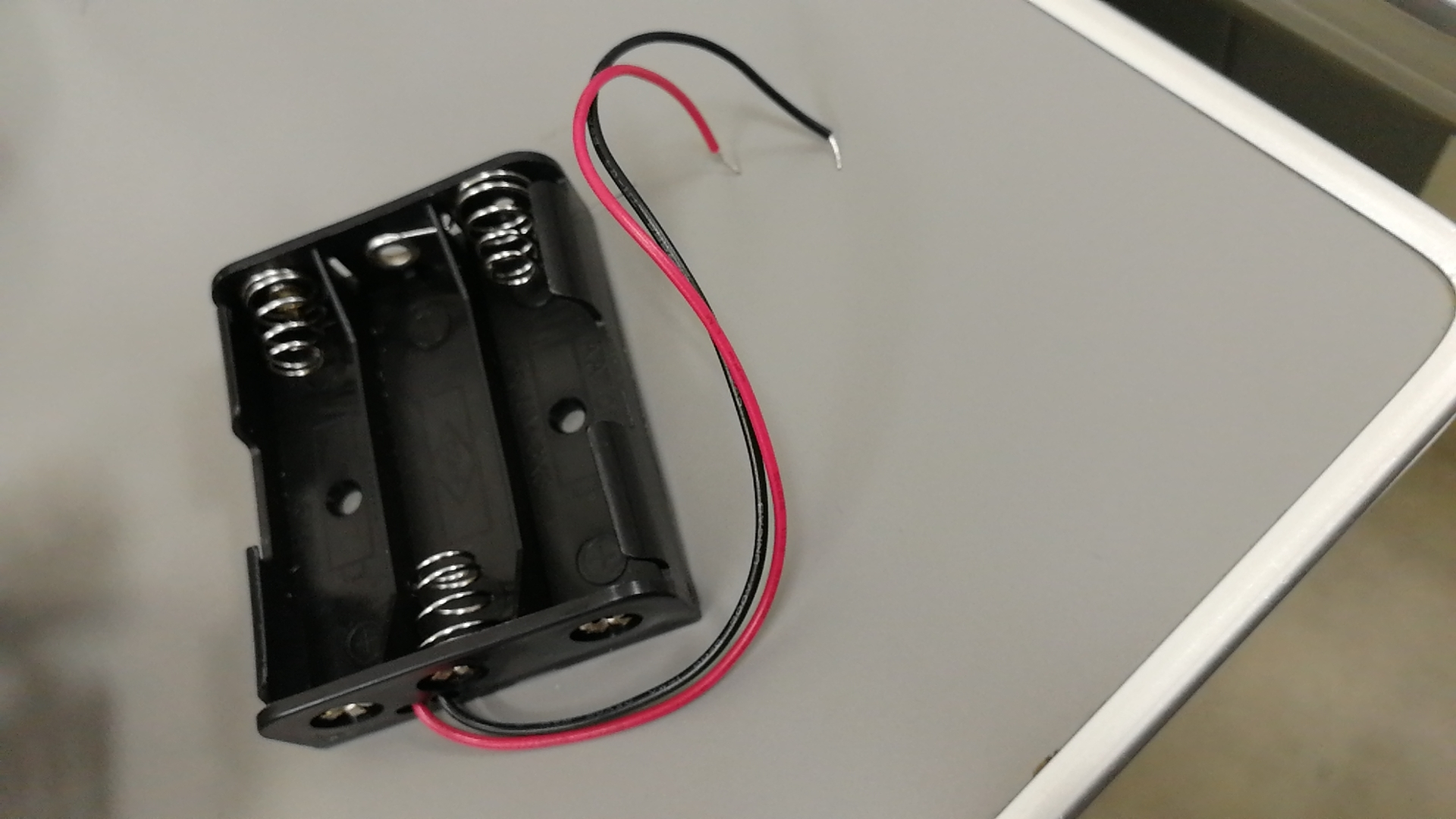
3.2.1 電池ボックスを加工する
3.2.2 電池ボックスを搭載する
A 電池ボックスに電池を入れる
B 電池ボックスに両面テープを貼る(非必須)
C 電池ボックスを搭載する
3.2.3 モバイルバッテリーを搭載する
A モバイルバッテリーに両面テープを貼る(非必須)
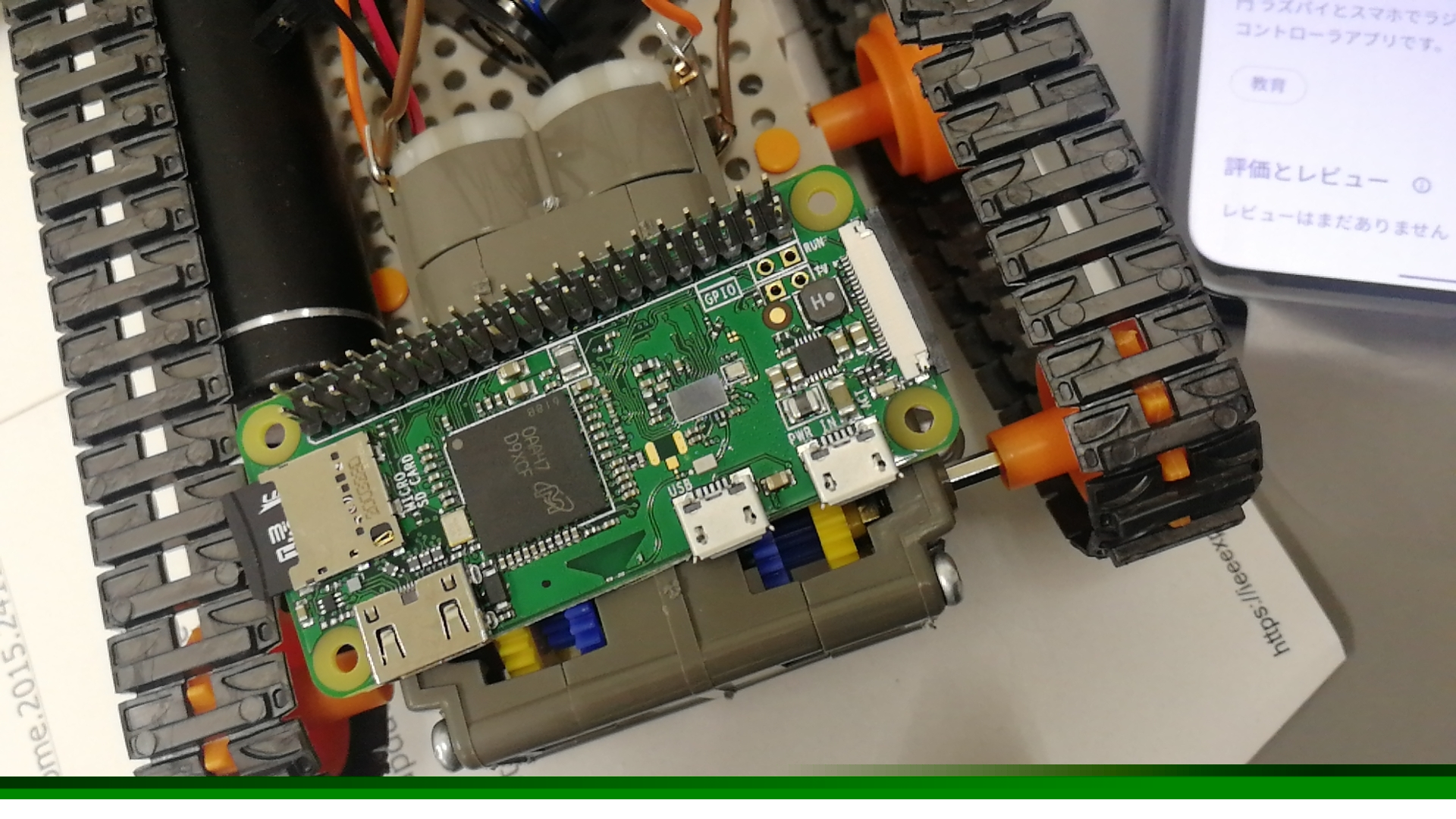
3.2.4 Raspberry Pi0を搭載する
A Raspberry Pi0に両面テープを貼る(非必須)
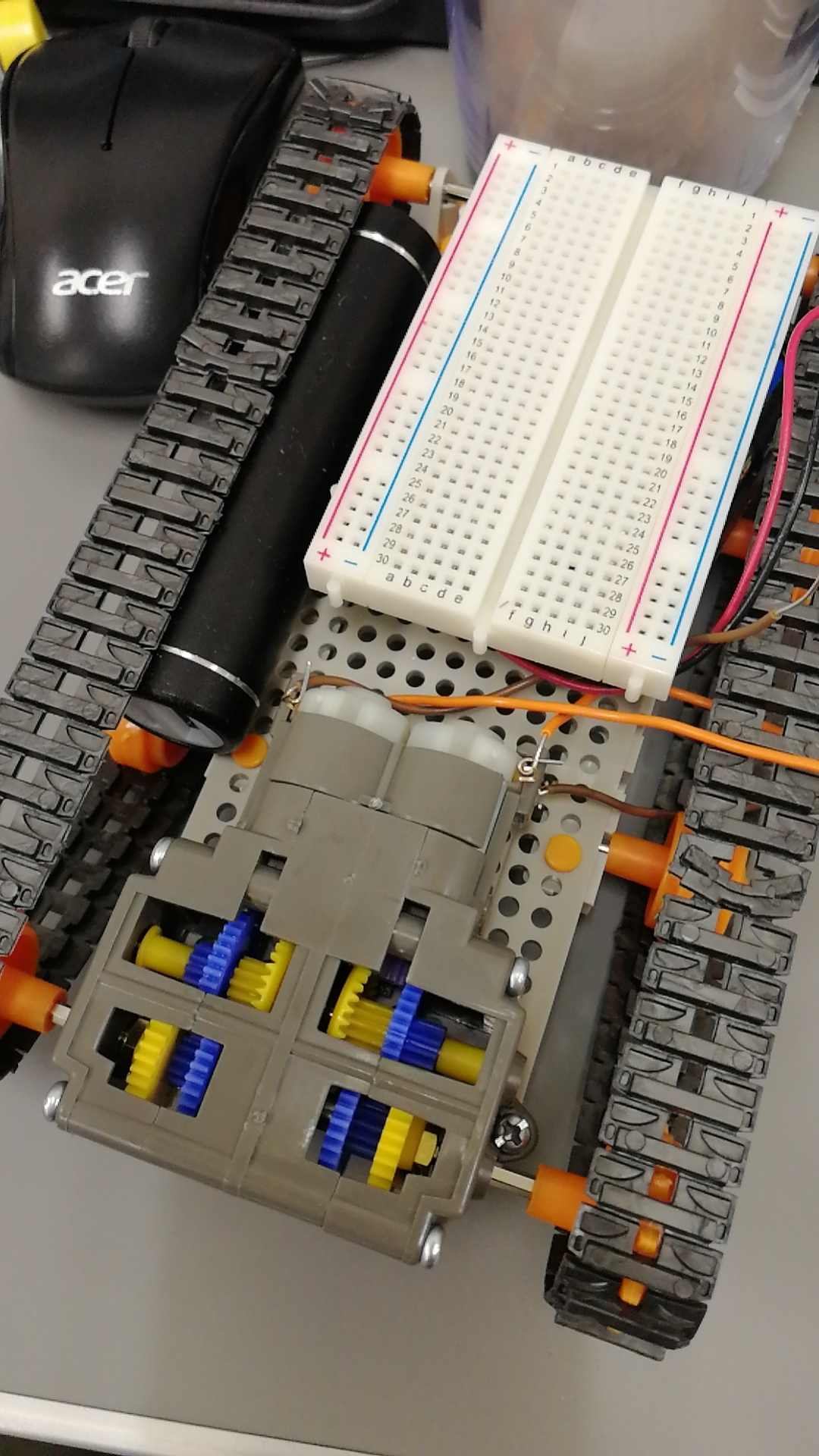
3.2.5 ブレッドボードを搭載する
A ブレッドボードに両面テープを貼る(非必須)
3.3 電子回路を作ろう
3.3.1 ジャンプワイヤを用意する
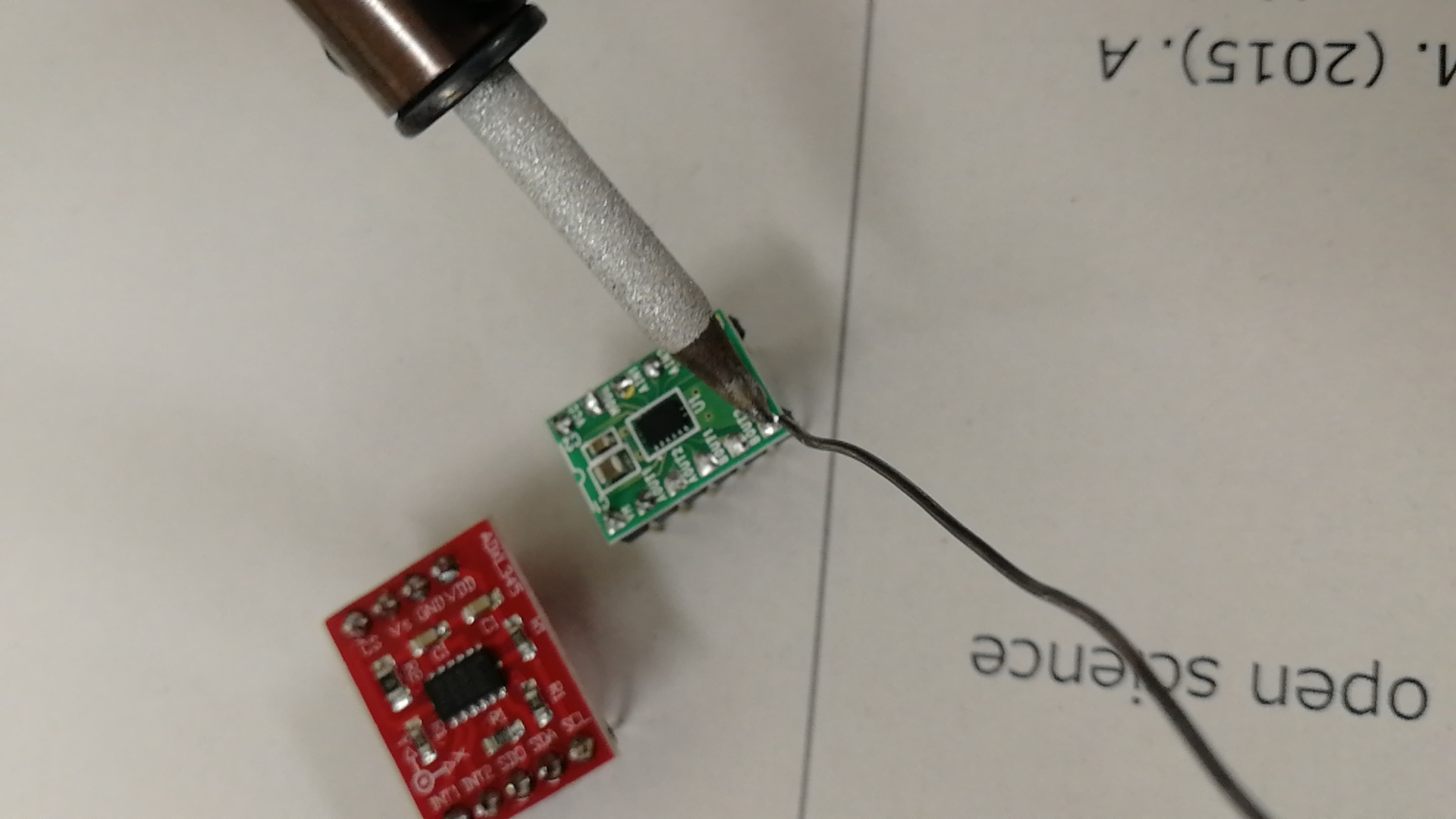
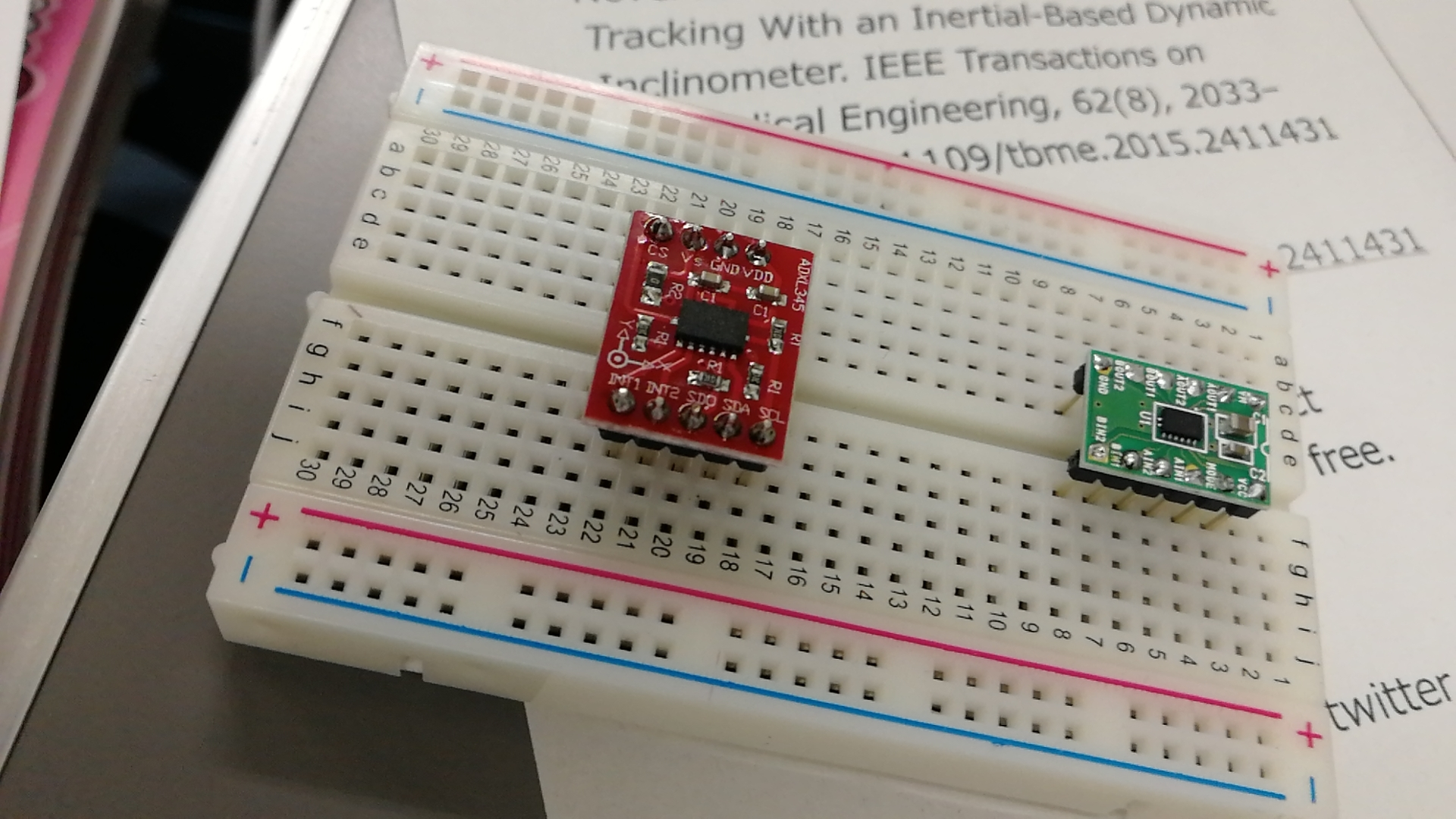
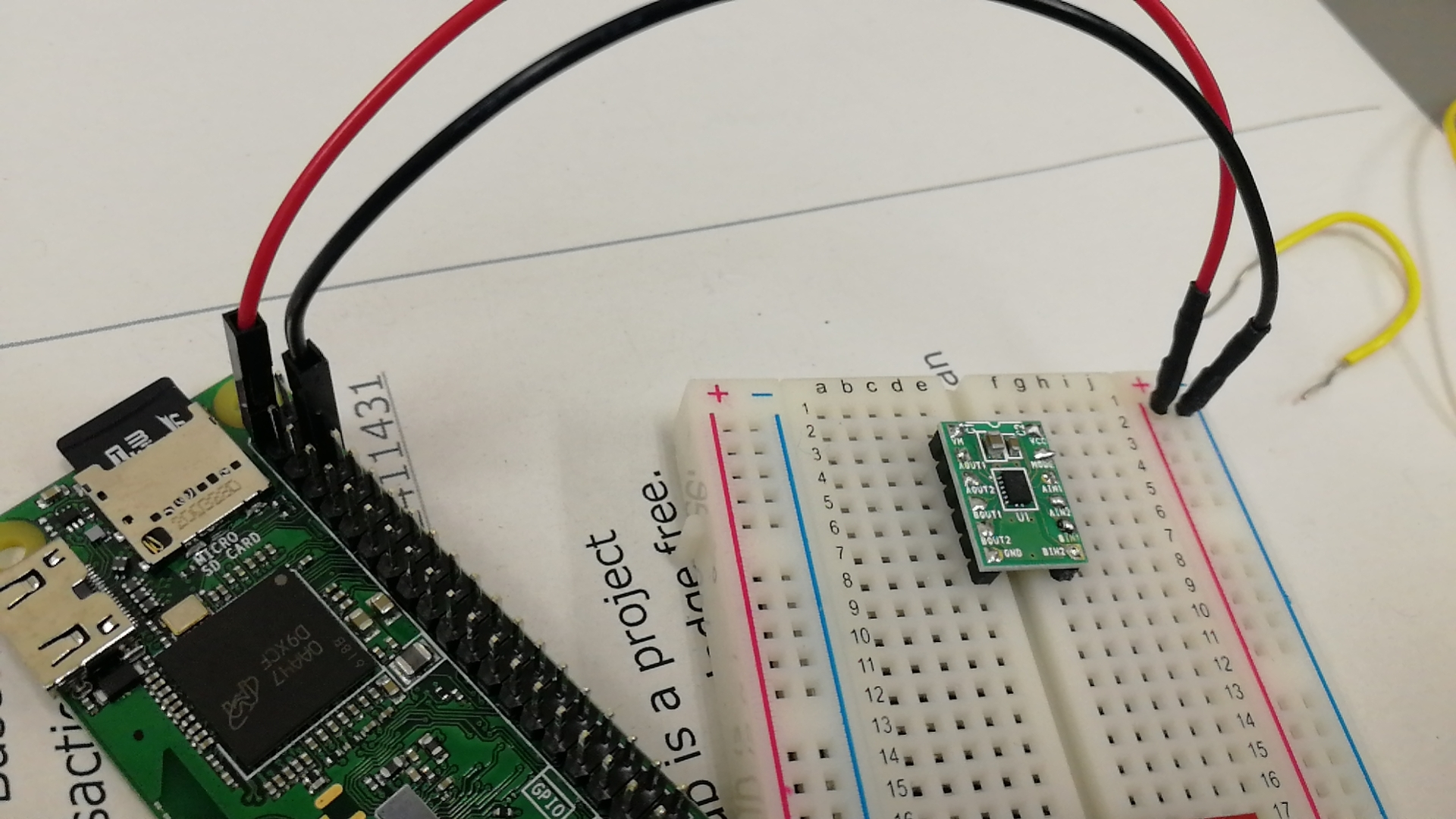
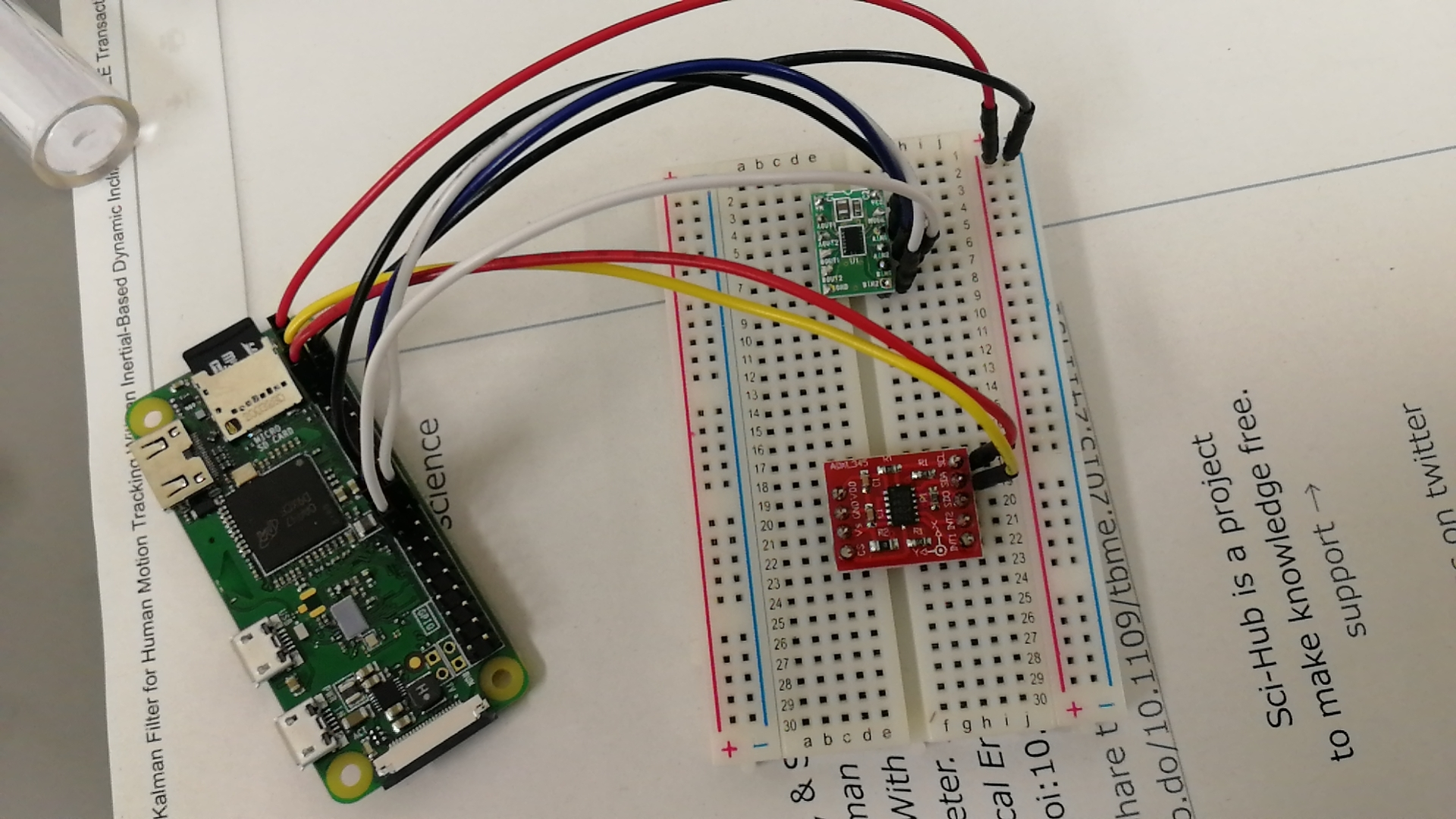
3.3.2 ICチップを配置する
モータードライバのICチップはVMを左上にして、ブレッドボードの3eに配置する
加速度のICチップはSCL右上にして、ブレッドボードの18hに配置する
3.3.3 ブレッドボードとRaspberry Pi0をつなぐ
A 電源をつなぐ
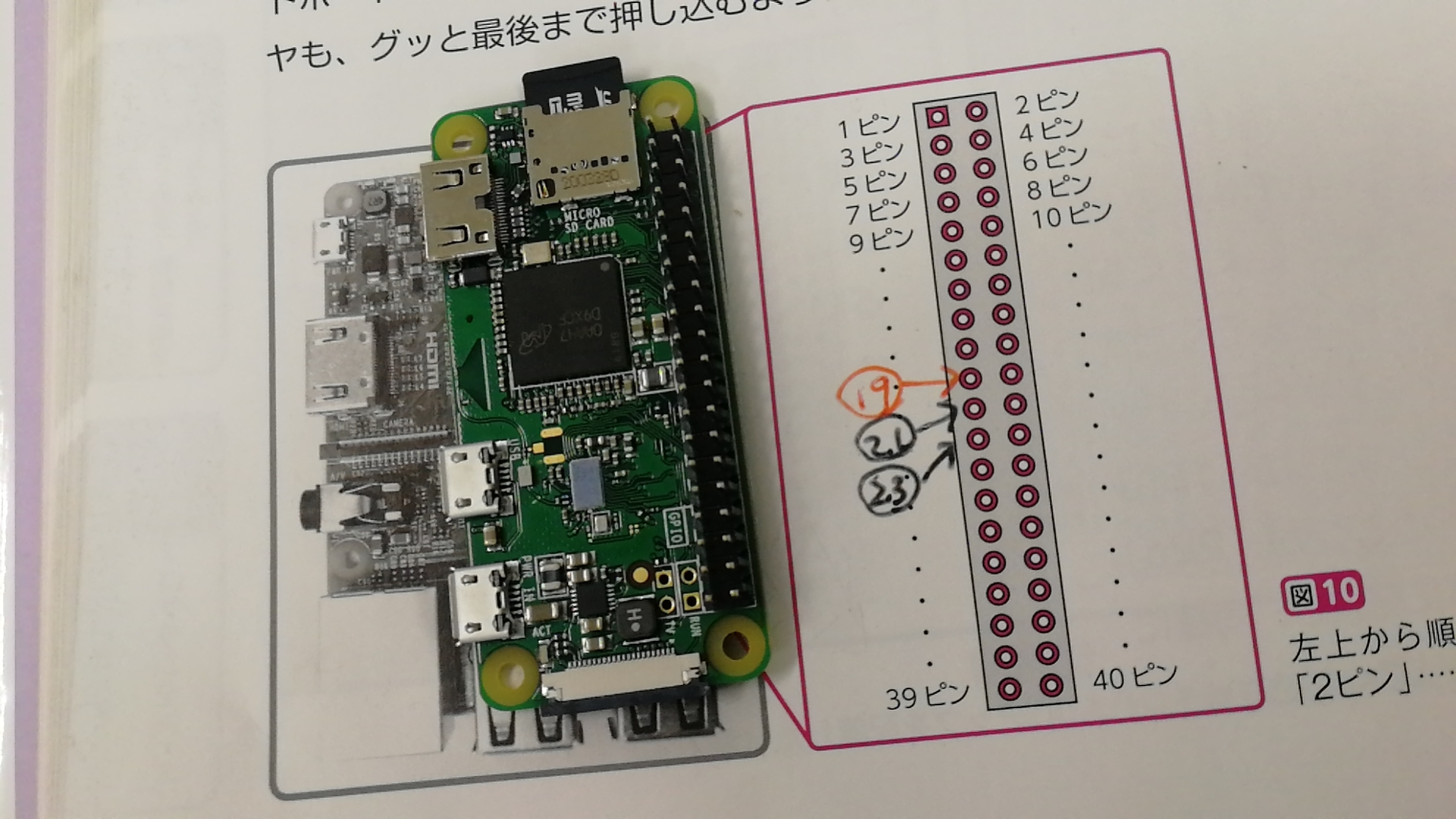
RaspberryPi 0の「1ピン」とブレッドボードの「+」とつなぎます。
RaspberryPi 0の「6ピン」とブレッドボードの「‐」とつなぎます。
「3ピン」とブレッドボードの「19i」とつなぎます。
「5ピン」とブレッドボードの「18i」とつなぎます。
「19ピン」とブレッドボードの「5g」とつなぎます。
「21ピン」とブレッドボードの「6g」とつなぎます。
「22ピン」とブレッドボードの「8g」とつなぎます。
「23ピン」とブレッドボードの「7g」とつなぎます。
B ICチップの配線をする
ブレッドボードの「3g」とブレッドボードの「+」とつなぎます。
ブレッドボードの「4g」とブレッドボードの「-」とつなぎます。
ブレッドボードの「8d」とブレッドボードの「-」とつなぎます。
ブレッドボードの「19c」とブレッドボードの「+」とつなぎます。
ブレッドボードの「20c」とブレッドボードの「-」とつなぎます。
ブレッドボードの「20i」とブレッドボードの「-」とつなぎます。
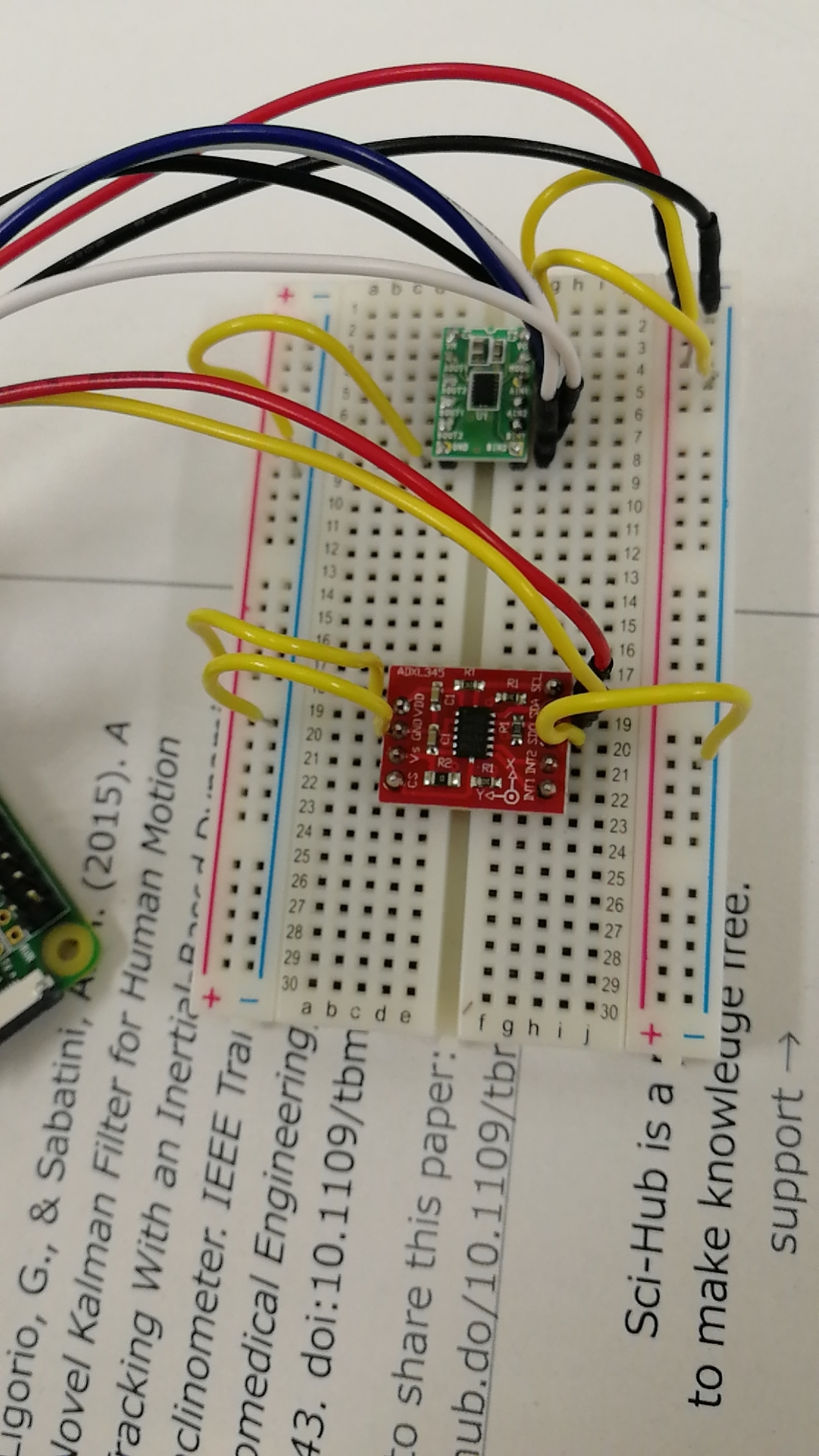
3.3.4 ブレッドボード内の配線をする
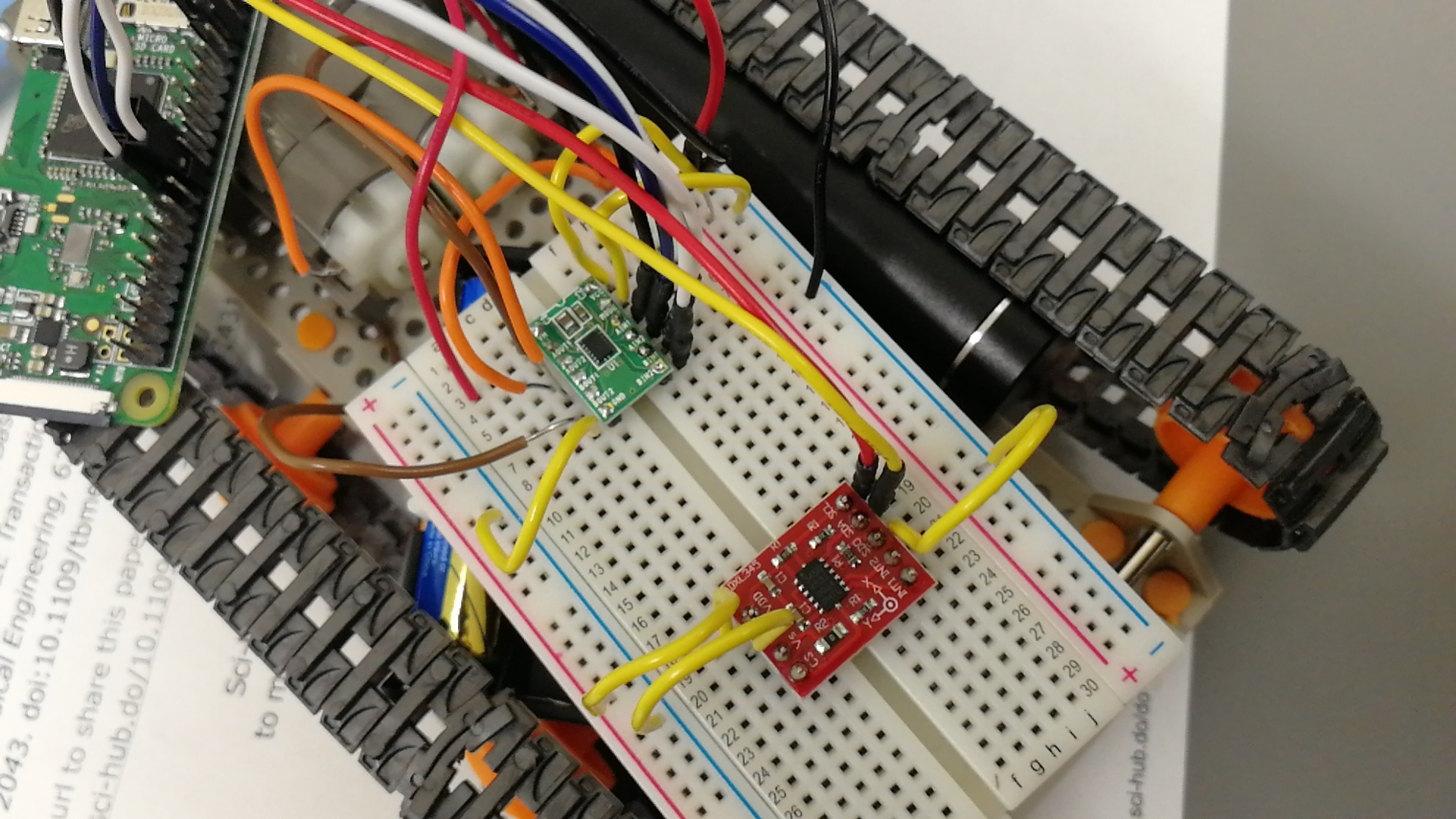
A モーター周りの配線をする
モーターの「左・赤」とブレッドボードの「6d」とつなぎます。
モーターの「左・黒」とブレッドボードの「7d」とつなぎます。
モーターの「右・赤」とブレッドボードの「5d」とつなぎます。
モーターの「右・黒」とブレッドボードの「4d」とつなぎます。
電池ボックスの「赤」とブレッドボードの「3a」とつなぎます。
電池ボックスの「黒」とブレッドボードの「-」とつなぎます。
モバイルバッテリーとRaspberry Pi0をつなぐ
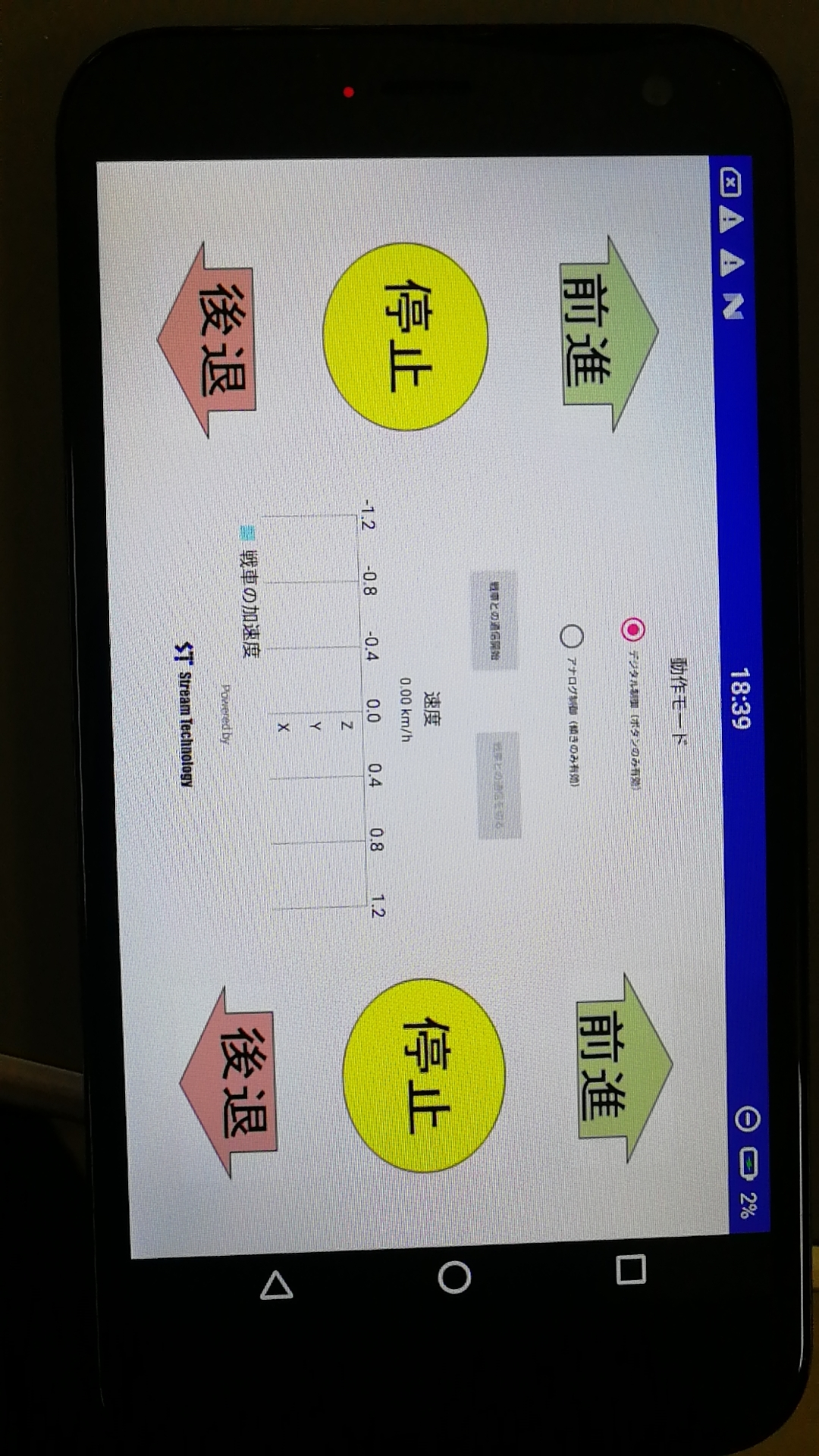
4. コントローラアプリをダウンロード
4.1 APPをダウンロード
4.1.1 PLAYストアでRasPiTankをダウンロードする

4.1.2 RC戦車と端末をペアリングしよう